Ende des Jahres 2013 ist meine Anlage / mein Raum das erste Mal vermessen worden. Zu dem Zeitpunkt hatte ich noch einen rein analogen Aufbau mit den Stacked Quads und dem RiPol. Getrennt habe ich mit der AFW1 bei 125Hz. Natürlich hatte ich zu dem Zeitpunkt ein paar Ideen, was verbessert werden könnte, aber im Großen und Ganzen war ich zufrieden.
Diese Messung änderte alles!
Sie hat mir gnadenlos aufgezeigt, was alles nicht in Ordnung war und mit welchen Kompromissen ich all die Jahre Musik gehört hatte.
Das führte in den folgenden Jahren zur Entwicklung des aktiven Absorbers und im Jahr 2021 zum Umstieg auf die digitale Signalverarbeitung. Seither lerne ich immer weiter hinzu, was zu teils erstaunlichen Verbesserungen der Wiedergabequalität in meinem Raum führt.
Neben der Möglichkeit, raumakustische Maßnahmen durchzuführen, hat mich auch der Artikel
Dr. Ulrich Brüggemann – Thoughts About Crossovers
davon überzeugt, diesen Weg zu beschreiten. Wenn man erkennt, wie unzureichend analoge Frequenzweichen sind und wie viel besser digitale FIR Filter diesen Job erledigen können, dann muss man einfach Konsequenzen daraus ziehen. Man findet den Artikel im Infocenter auf der AudioVero Homepage.
Die digitale Signalübertragung bietet einem auch die Möglichkeit der Laufzeitanpassung in einem Mehrwegesystem. Ein auf mehrere Lautsprecher aufgeteiltes Musiksignal, das anschließend nicht zeitgleich am Ohr ankommt, wird per se nicht korrekt wiedergegeben.
Im Folgenden beschreibe ich den aktuellen Weg, den ich nutze, um meinen Aufbau zu messen und daraus Korrekturdateien zu ermitteln. Ich hoffe, dass ich anderen Anwendern von Acourate und dem AcourateConvolver damit Anregungen und einen Leitfaden für die Optimierung geben kann.
Einen sehr guten Einstieg in Acourate bekommt man mit der Anleitung „Schnelleinstieg in Acourate“, die man im Infocenter auf der AudioVero Homepage als pdf-File finden kann.
Wenn man sich nicht scheut, Anleitungen in Englisch zu lesen, dann bietet sich auch das folgende Buch an:
Mitch Barnett – Accurate Sound Reproduction Using DSP
Mitch setzt jedoch JRiver ein und es gibt keinerlei Informationen über den AcourateConvolver. Es werden allerdings jede Menge technische und akustische Hintergründe erklärt. Man bekommt es als Buch oder als Kindle eBook. Auch wenn ich selbst JRiver nicht verwende, so fand ich das Buch doch ungemein lehrreich.
Im Folgenden wird man immer wieder auf Empfehlungen, Einstellungen oder Messungen von Mitch stoßen.
Die eingesetzten Hard- und Software Komponenten bestimmen zumindest an einigen Stellen die Vorgehensweise bei der Acourate Optimierung des eigenen Systems. Deshalb kann es individuell zu Abweichungen kommen.
Das System ist ziemlich aufwendig und somit fehleranfällig. Es setzt voraus, dass man über Kenntnisse in der digitalen Signalverarbeitung verfügt. Zudem muss man wissen, wie man Rechner und Netzwerke administriert und ein Betriebssystem aufsetzt. Fehlen die benötigten Kenntnisse und klemmt es an einer Stelle, ist es sehr schnell vorbei mit dem entspannten Musikhören über ein optimiertes Wiedergabesystem. Läuft allerdings alles wie gewollt, erhält man eine Wiedergabequalität, die man nie für möglich gehalten hätte.
Der Aufwand lohnt sich auf jeden Fall!
Am besten sucht man sich jemanden, der einem als Mentor zur Seite steht. Das vereinfacht den Einstieg ungemein.
Beschreibung der Komponenten
11. Juni 2024
Neben Acourate selbst ist der AcourateConvolver eine der wichtigsten Softwarekomponenten, die ich einsetzte. Dies hat direkte Auswirkungen darauf, wie die berechneten Parameter und Korrekturdateien verarbeitet werden. Es bestimmt auch die Topologie der Hardware.
Verwendete Hardware
Im Zentrum der Audio Signalverarbeitung sitzt bei mir ein Lynx Aurora(n) Studio Wandler. Da dieser Wandler modular aufgebaut ist, muss diese Aussage näher spezifiziert werden: Es handelt sich um einen „PRE 2016 DANTE”. Das bedeutet, dass der Wandler auf der analogen Seite mit 16 Ein- und Ausgängen sowie 4 Mikrofoneingängen ausgestattet ist. Für die digitale Signalübertragung ist er mit einer Karte zur Kopplung mit einem Dante Netzwerk bestückt.
Der AcourateConvolver läuft auf einem PC mit einem Intel Core i7-13700K und 16GB RAM. Als Betriebssystem verwende ich Windows Server 2022 Standard für 24 Cores. Meine Erfahrungen haben gezeigt, dass es der Audioleistung zugutekommt, wenn der Rechner möglichst wenig zu tun hat. Deshalb setze ich eine potente CPU und ein Server-Betriebssystem ein. Der Rechner läuft ohne Maus, Tastatur und Monitor. Er wird von mir Remote administriert. Der Rechner ist mit zwei Ethernet-Schnittstellen ausgestattet. Die erste ist mit meinem privaten Netzwerk verbunden, die zweite wird für die Verbindung ins Dante Netzwerk verwendet. Da der Rechner in einem Nebenraum steht, kann er aktiv gekühlt werden. Somit bin ich bei der Auswahl der CPU nicht auf 65W Typen beschränkt, die sich noch passiv kühlen lassen.
Im Zentrum des Dante Netzwerks sitzt ein Cisco SG250-08 Managed Switch. Das Dante Netzwerk wird bei mir ausschließlich für die Übertragung von Audiodaten genutzt. Die Einstellungen des Switches sind für diese Übertragung optimiert. Ich setze CAT6-Kabel ein.
Bei dem hier beschriebenen aktiven Mehrwegesystem muss die Lautstärke hinter der Faltung (AcourateConvolver) erfolgen. Aus diesem Grund wird ein entsprechender Mehrkanalvorverstärker benötigt. Ich setze an dieser Stelle meinen VV7-Vorverstärker ein. An dessen Ausgängen sind die Endstufen angeschlossen. Diese treiben die einzelnen Lautsprecher meines RQM Systems an. Aktuell sind es sieben Wege.
In meinem Setup gibt es einen zweiten PC. Er ist passiv gekühlt und steht direkt im Hörraum. Als Prozessor wird ein Intel Core i5-10600 mit 16GB RAM verwendet. Auf diesem Rechner kommt Windows 11 Pro zum Einsatz. Er ist mit Maus, Tastatur und Monitor ausgestattet. Auch dieser Rechner hat zwei Ethernet-Schnittstellen (internes Netz und Dante). Ich verwende diesen Rechner für die Acourate Messungen und die Administration des Convolver-PCs, des Lynx Wandlers und des Dante Netzwerks.
Den Einfluss des Messequipments sollte man nicht unterschätzen! Was mit einem billigen Messmikrofon nicht erfasst wird, kann auch nicht korrigiert werden. Hier verhält es sich wie beim Vergleich einer günstigen Audioanlage mit einem hochauflösenden High-End-System. Ein Korrekturfile für das Mikrofon hilft da auch nicht, denn es korrigiert nur den Frequenzgang, verbessert aber nicht die Auflösung. Ich habe am Anfang ein solches Mikrofon (unter 100 €) verwendet und nutze heute ein Earthworks M50. Die Unterschiede waren mehr als deutlich zu hören. Entsprechend verhält es sich mit dem Rest des Messkanals. Selbstverständlich gibt es auch für das Earthworks Mikrofon ein Korrektur-File. Trotzdem kann man die ersten Versuche natürlich erst einmal mit günstiger Messtechnik durchführen.
Verwendete Software
Wie oben schon beschrieben, verwende ich neben Acourate auch den AcourateConvolver.
Um die beiden PCs in das Dante Netzwerk einbinden zu können, ist auf den Rechnern die Dante Virtual Soundcard (DVS) installiert. Über eine ASIO-Schnittstelle stellt sie die Verbindung zwischen Audio-Software und Ethernet-Schnittstelle / Dante Netzwerk her. Auch mein Roon Server ist auf diese Weise in das Dante Netzwerk eingebunden.
Auf dem Mess-PC ist außerdem die Software Dante Controller installiert. Über diese Software wird die komplette Administration des Dante Netzwerks und der damit verbundenen Komponenten durchgeführt.
Auf diesem Rechner ist auch die Software Lynx NControl installiert. Damit kann der Wandler konfiguriert werden. Die Verbindung erfolgt über das Dante Netzwerk, sodass keine weitere Hardware-Verbindung notwendig ist.
Optimierung des RQM Systems
15. März 2026
Im Folgenden beschreibe ich die Vorgehensweise, um mein RQM System einzumessen. Sie ist allerdings nicht nur auf mein System beschränkt und der größte Teil kann wie beschrieben übernommen werden. Texte, die zwischen zwei Trennstrichen stehen, sind entweder Hinweise zu speziellen Einstellungen und Vorgehensweisen für mein System oder technische Ausführungen, die zum tieferen Verständnis beitragen, aber nicht unbedingt gelesen werden müssen.
Zum Zeitpunkt der Erstellung dieser Seite habe ich Acourate in der Version 2.1.6 und den AcourateConvolver in der Version 2.0.7 verwendet. Im August 2024 gab es bei Acourate ein Update auf die Version 3.1.0 und beim AcourateConvolver ein Update auf Version 2.2.2.
Mein Dante Netzwerk betreibe ich mit 96kHz / 24Bit. Diese Einstellung hat sich für mich als „Sweet Spot“ herausgestellt. Bei höheren Frequenzen empfinde ich die Audio-Wiedergabe als etwas „angestrengt”. Ich führe auch alle Messungen mit dieser Abtastrate durch.
Der Lynx Wandler ist der Taktgeber im meinem Dante Netzwerk.
Ich lege für jede Messung ein eigenes Verzeichnis mit dem aktuellen Datum im Namen an. Somit erhalte ich eine chronologische Historie. Zudem mache ich mir Notizen zu den Messungen und den Ergebnissen. Dafür verwende ich Joplin. So kann ich jederzeit nachvollziehen, was ich an dem System alles ausprobiert habe.
An dieser Stelle muss ich ein wenig vorgreifen. Ich betreibe mein System mit einer Filterlänge von 262144 Taps. Dies ist die größtmögliche Anzahl, die sich in Acourate einstellen lässt. Die Empfehlung für 96kHz liegt bei 131072 Taps, aber so klingt es für mich eindeutig besser.
Da die Resonanzen in einem Raum teilweise extrem schmal sind, ist eine geeignete Frequenzauflösung bei den FIR-Filtern erforderlich. Der mathematische Zusammenhang ist dabei relativ simpel.
fs ist die Samplerate und N die Filterlänge. Mit einer Taktfrequenz von 96kHz und einer Filterlänge von 262144 Taps ergibt sich:
Mit der empfohlenen Filterlänge von 131072 Taps bei 96kHz halbiert sich die Frequenzauflösung auf 0.732Hz. Insbesondere im niedrigeren Frequenzbereich ist der Unterschied bei mir sehr deutlich zu hören.
Das ist auch der Grund, warum Lösungen mit günstigen DSPs nicht gut funktionieren. Die technischen Möglichkeiten sind in der Regel viel zu gering (z.B. 48kHz mit 8192 Taps).
Der Begriff Tap leitet sich übrigens vom englischen „to tap“ (abgreifen) ab, da bei FIR-Filtern Zwischenwerte aus der Verzögerungsleitung „abgegriffen“ und mit Koeffizienten multipliziert werden.
Bevor das System optimiert werden kann, muss zunächst das Signal Routing im Dante Netzwerk festgelegt werden. Ohne ein korrektes Routing wird das System keinen Ton von sich geben. Dies gilt selbstverständlich auch für alle anderen digitalen Lösungen. Eine entsprechende Beschreibung ist allerdings nicht Teil dieses Dokuments.
Ebenso setze ich voraus, dass Acourate und AcourateConvolver installiert und lizenziert sind. Somit von der Software Seite aus alles einsatzbereit ist.
Die folgende Beschreibung ist chronologisch aufgebaut und sollte in dieser Reihenfolge durchgeführt werden.
Erstellung des Kalibrierfiles für das verwendete Mikrofon
31. Dezember 2023
Jeder seriöse Hersteller von Messmikrofonen stellt individuelle Kalibrierdaten zur Verfügung. Mithilfe dieser Daten erzeugt man für die Messung mit Acourate eine Korrekturdatei. Dieses wird bei den Messungen eingebunden, um die Ungenauigkeiten des Mikrofons direkt zu korrigieren.
Die Herausforderung besteht darin, zu erkennen, ob es sich bei den zur Verfügung gestellten Daten um die originalen Messdaten handelt oder ob sie bereits vom Hersteller invertiert wurden. Wie man das relativ sicher erkennen kann, erkläre ich ein paar Zeilen weiter unten. Natürlich kann man sich auch direkt beim Hersteller erkundigen.
Bei meinem Earthworks M50 wird die entsprechende Datei als Textdatei geliefert. Sie enthält pro Zeile ein Messwertpaar (Frequenz und Amplitude) und kann direkt in Acourate eingelesen werden. Unten sind die ersten zehn Zeilen dieser Datei als Beispiel aufgeführt.
Man kann davon ausgehen, dass die Amplitude eines Mikrofons zu den tiefen Frequenzen hin abnimmt. Dies kann als Indikator dafür dienen, ob die gelieferten Messdaten bereits invertiert wurden. Bei meiner Datei ist zu erkennen, dass der Amplitudenwert bei 3 Hz mit -2,38 dB kleiner ist als der bei 10 Hz (1,38 dB). Die Daten sind demnach nicht invertiert.
Zunächst habe ich einen eigenen Ordner für die Kalibrierdaten angelegt. Da ich nur ein Messmikrofon nutze, ist an dieser Stelle kein Unterordner erforderlich. Das Kalibrierfile des Herstellers habe ich dort unter einem leicht erkennbaren Namen abgespeichert.
Nach dem Aufruf von Acourate wird dieses Verzeichnis als Arbeitsverzeichnis ausgewählt und die Abtastfrequenz (hier: Samplerate 96000) gesetzt. Anschließend kann die Datei über
File -> Import Magnitude (Mic Calibration or Target Curve)
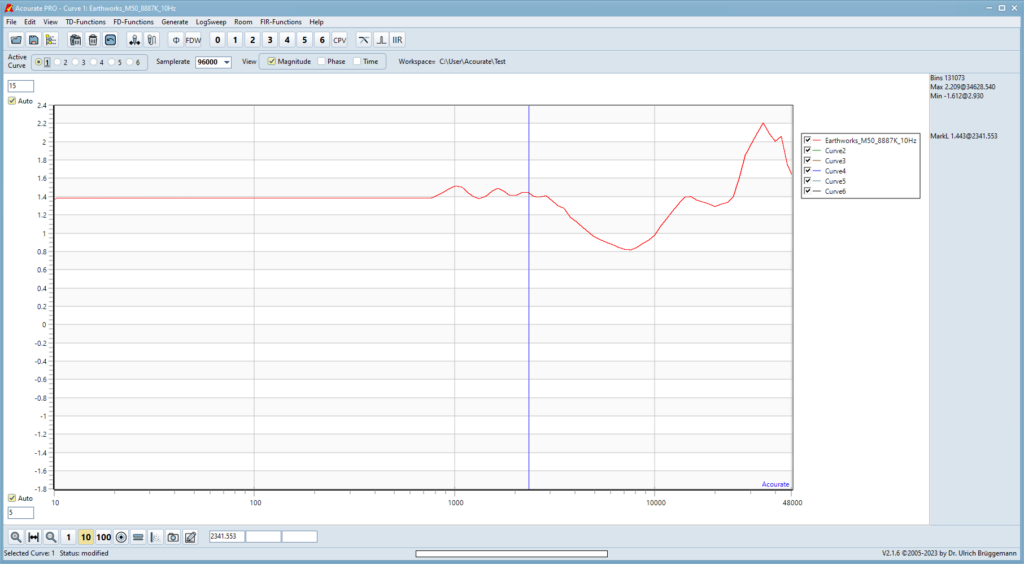
eingelesen werden. Hat man die entsprechende Datei selektiert, erscheint als nächstes eine Abfrage nach der „Pulse length selection“. Ich wählte an dieser Stelle natürlich 262144 (siehe oben). Anschließend wird noch abgefragt, ob man ein „minimum phase result“ haben möchte. Diese Abfrage wird mit „yes“ beantwortet. Danach werden die Daten eingelesen und in Active Curve 1 dargestellt.
Acourate: Amplitude meines Earthworks M50
Meine Kurve erreicht ein Minimum von 0,8 dB und ein Maximum von 2,2 dB. Der mittlere Verlauf liegt bei 1,4 dB.
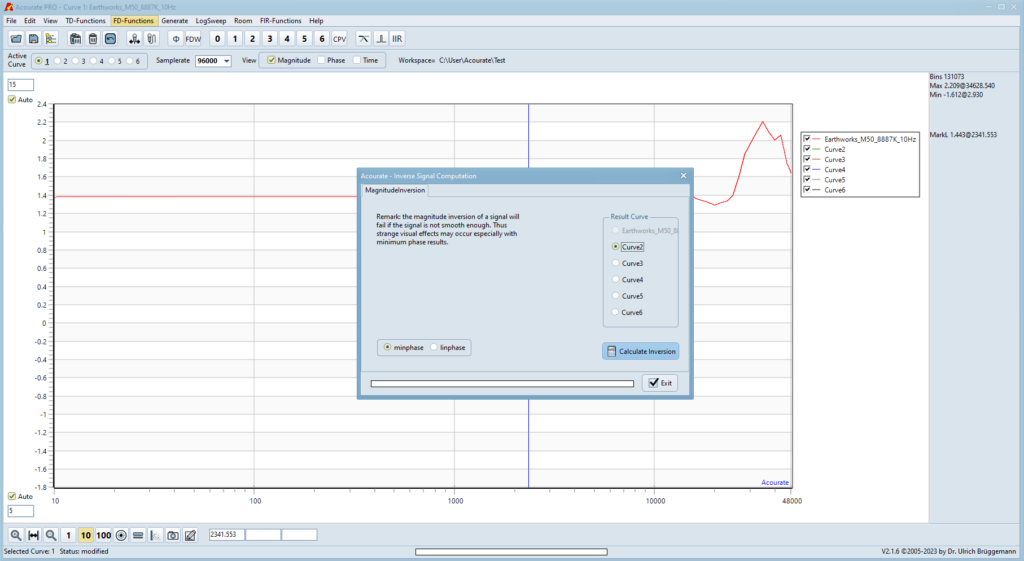
In meinem Fall muss ich nun aus den Daten die Inverse berechnen. Durch einen Aufruf von
FD-Function -> Magnitude Inversion
erhält man das folgende Fenster
Acourate: Inverse Signal Computation
Hier selektiert man „minphase“ und „Curve2“. Danach wird die Inverse mit „Calculate Inversion“ berechnet und in Active Curve 2 dargestellt.
Abschließend muss die Inverse abgespeichert werden. Diese Kurve wird bei allen folgenden Messungen zur Linearisierung der Messkurve verwendet. Man muss sicherstellen, dass das Fenster Active Curve 2 aktiv ist. Mit dem Menüpunkt
File -> Save Mono WAV
wird die Inverse dann gespeichert. Zuvor muss man sich noch für das Format dieser Datei entscheiden („desired resolution“). Bei einem High-End-System fällt die Wahl natürlich auf „64: double float (default)”. Abschließend kann man noch einen individuellen Namen für die Kalibrierdatei vergeben. Bei mir heißt die Datei „M50Invers96-262k.wav”. Aus dem Namen kann ich somit alle relevanten Daten entnehmen.
Wenn die Daten bereits vom Hersteller invertiert wurden, entfällt dieser Schritt. Nach dem Einlesen der Daten wird die Kurve mit aktiviertem Active Curve 1 wie oben beschrieben abgespeichert.
Erzeugung der Frequenzweiche
15. März 2026
Bei einem Aufbau wie dem meinen lassen sich keine Messungen des Gesamtsystems durchführen, ohne dass eine Frequenzweiche auf dem AcourateConvolver läuft. Natürlich muss zuvor das Routing der Audio Signale erfolgreich durchgeführt worden sein.
Für die Dateien der Frequenzweiche gibt es bei mir einen eigenen Ordner mit einer Reihe von Unterordnern. Dort sind alle möglichen Versuche mit der Frequenzweiche abgelegt. Auch hier versuche ich wieder, prägnante Namen zu wählen. Es gibt zudem zu jeder Berechnung eine eigene Beschreibung in meinem Joplin.
Als erstes wird der Ordner für die Frequenzweiche als Arbeitsordner festgelegt. Anschließend wird die Frequenzweiche in Acourate mit
Generate -> Crossover
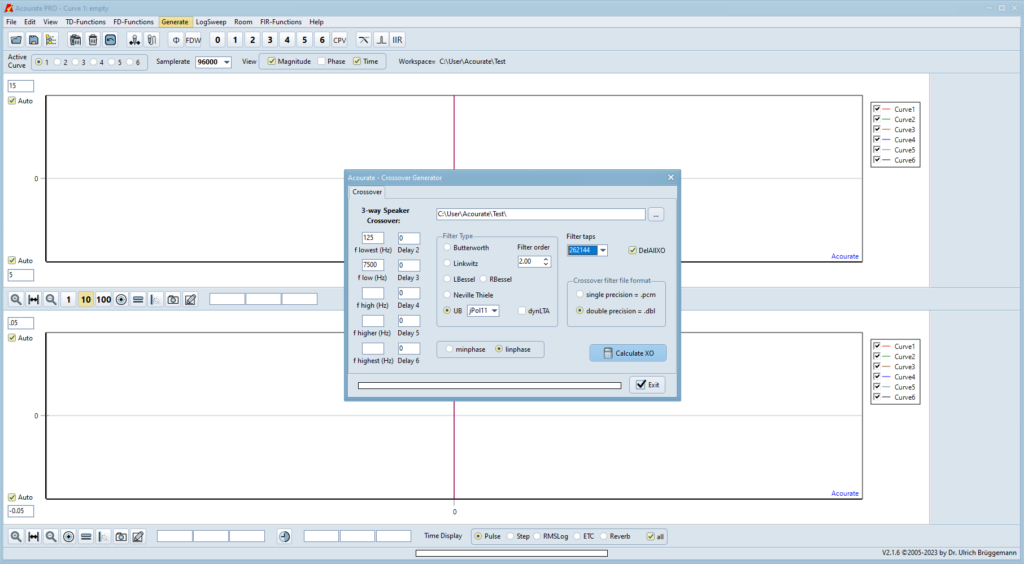
erzeugt. In dem sich öffnenden Fenster werden alle relevanten Parameter angegeben.
Acourate: Erstellung einer Frequenzweiche
Die Parameter für meine Frequenzweiche sind bereits eingetragen. Ich verwende eine 3-Wege-Weiche mit Übergangsfrequenzen von 125Hz und 7,5kHz. Die Delays benutze ich an dieser Stelle nie, daher ist bei allen ein Wert von 0 eingetragen. Als Filtertyp setze ich einen UB jPol11 FIR-Filter mit einer Ordnung von 2 (ohne dynLTA) ein. Wie oben schon geschrieben, lasse ich die Weiche mit der maximal möglichen Anzahl an Taps (262144) rechnen. Die Weiche wird mit linearer Phase erstellt (linphase). Das ist der große Vorteil der FIR-Filter gegenüber den IIR-Filtern. Das „double precision“-Dateiformat ist schon vorgewählt. Mit „Calculate XO” werden die Dateien erzeugt und im aktuellen Verzeichnis gespeichert.
Ein Weiche mit linearer Phase (FIR) wird beschrieben durch
|H(f)| ist der Frequenzgang, ω die Kreisfrequenz und τ die konstante Verzögerung.
Das bedeutet, dass alle Frequenzen um exakt die gleiche Zeit verzögert werden. Daraus ergeben sich die folgenden Vorteile:
keine Phasenverzerrung
perfekte Transientenstruktur
perfekte Zeitrelation zwischen den Frequenzen
Ein Filter mit minimaler Phase (IIR) verändert hingegen eben diese. Es ergibt sich
Das bedeutet, dass verschiedene Frequenzen unterschiedliche Verzögerungen haben. Die Folgen sind
Verzerrungen in der Gruppenlaufzeit
Transienten werden minimal verschmiert
Allerdings erzeugen Filter mit linearer Phase Vorschwinger (Pre-Ringing), was bei Filtern mit minimaler Phase nicht der Fall ist.
dynLTA
Usually NT and UB crossovers do not show up a wide transition area between passband and stopband. So with a typical 3-way system just two crossovers max overlap for each frequency (imagine that with a 6 dB slope crossover multiple XOs can overlap in the same frequency range). Now it may happen that if two corner frequencies are too close together also with NT/UB three XOs share the same frequency range. At this point dynLTA gets into the game. With a preselected order of 1 you can mark the dynLTA option and Acourate will calculate the highest necessary filter order (floating point allowed) which is required to ensure that there are only two XOs sharing the same frequencies.
In meinem Fall sind insgesamt 6 Dateien erzeugt worden:
XO1L96.dbl, XO1R96.dbl – bis 125Hz
XO2L96.dbl, XO2R96.dbl – von 125Hz bis 7,5kHz
XO3L96.dbl, XO3R96.dbl – ab 7,5kHz
Acourate bezeichnet die Frequenzweichen-Files mit „XO*.dbl”. Die Nummerierung beginnt beim Bass. „L” und „R” bezeichnen natürlich den linken und rechten Kanal. Zum jetzigen Zeitpunkt sind die jeweiligen Dateien der beiden Kanäle identisch. Die Zahl 96 gibt Auskunft über die zugrunde liegende Abtastfrequenz.
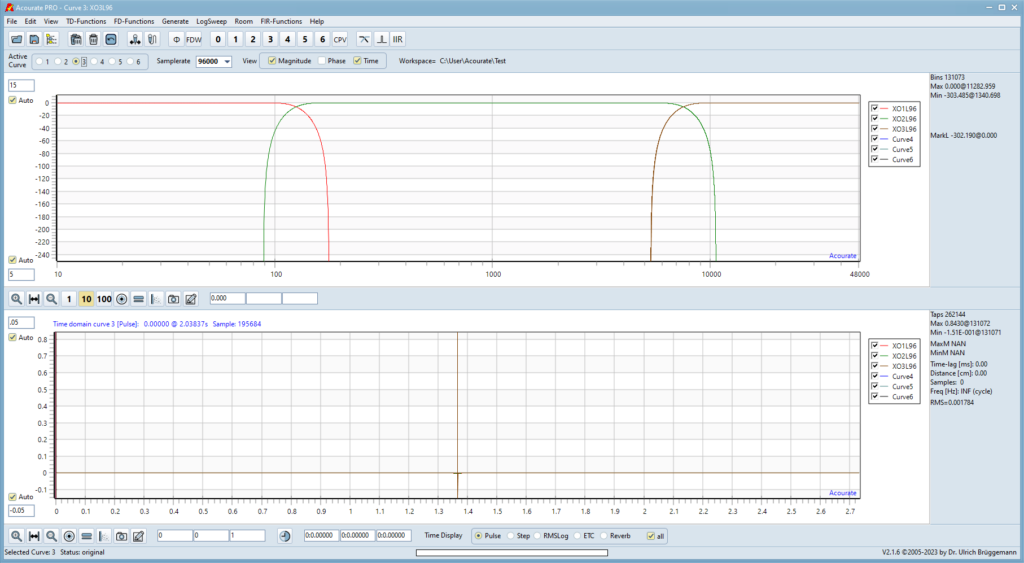
Acourate: linker Kanal meiner 3-Weg Weiche
Auf dem oberen Bild sind die Frequenzverläufe der drei Wege für den linken Kanal dargestellt. Sie addieren sich perfekt zu einem Dirac-Puls (unten). Die Kreuzungspunkte in den Übergangsfrequenzen liegen bei -6 dB, genau wie es sein soll.
Als letztes müssen die erzeugten Dateien noch für den Convolver konvertiert werden. Hierzu ruft man
Room -> Create CPV for AcourateConvolver
auf. Im sich öffnenden Auswahlfenster wird der erste Eintrag selektiert. In der Regel ist dies XO1L*.dbl, alles andere läuft dann automatisch ab. Anschließend befinden sich neben den *.dbl-Dateien auch die entsprechenden *.cpv-Dateien im Verzeichnis.
Spezielle Auslegung für das RQM System:
In meinem RQM-System laufen pro Kanal zwei 57er Quad ESL parallel. Hardwaremäßig wird jede Quad einzeln angesteuert. Damit ich auch individuelle Korrekturdateien für jede einzelne Quad verwenden kann, erzeuge ich abschließend aus der 3-Wege-Weiche eine mit 2×4 XO-Files.
Ich benenne die XO3* Dateien in XO4* um und kopiere die XO2* Dateien auf XO3*. Aus Sicht von Acourate erzeugte ich damit eine 4-Wege Weiche. Allerdings sind zum jetzigen Zeitpunkt die XO2* und XO3* Dateien identisch. In meinem Verzeichnis liegen danach die folgenden Dateien vor:
XO1L96.dbl, XO1R96.dbl – bis 125Hz / RiPol Subwoofer
XO2L96.dbl, XO2R96.dbl – von 125Hz bis 7,5kHz / obere Quads
XO3L96.dbl, XO3R96.dbl – von 125Hz bis 7,5kHz / untere Quads
XO4L96.dbl, XO4R96.dbl – ab 7,5kHz / Mundorfs
Bemerkung: Dass es pro Kanal zwei identische Frequenzbereiche gibt, stört Acourate bei der abschließenden Berechnung der Korrekturdateien (siehe Makro 4) nicht. Dort werden die Korrekturdaten einfach mit den einzelnen Frequenzweichen-Files gefaltet.
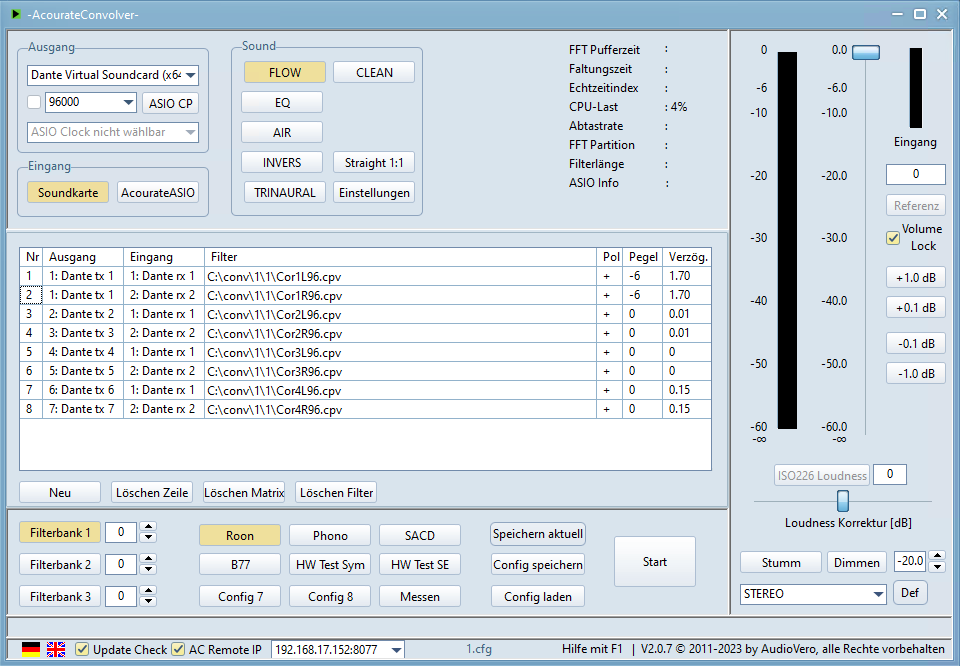
Konfiguration des AcourateConvolver
15. März 2026
Im AcourateConvolver können neun Konfigurationen mit jeweils drei Filterbänken ausgewählt werden. Die dazugehörigen Faltungsdateien (*.cpv) befinden sich in Verzeichnissen auf dem Rechner. Ich weiche jedoch von dem bei der Installation des AcourateConvolvers eingerichteten Ort ab und lege alle meine Daten in einem Verzeichnis namens
c:\conf
Für mich ist es so am einfachsten. Es spricht allerdings auch nichts dagegen, den AcourateConvolver Standard zu nutzen.
In diesem Verzeichnis gibt es Unterverzeichnisse mit den Namen „1” bis „9”. Diese beziehen sich auf die insgesamt neun möglichen Konfigurationen. Pro Unterverzeichnis gibt es dann jeweils noch einmal Verzeichnisse mit den Namen „1” bis „3”, die den Filterbänken zugeordnet sind. Diese Struktur wird bei der Installation angelegt und ich habe sie in meinem Verzeichnis übernommen. Man kann sich aber auch ohne Probleme eine eigene Struktur überlegen.
Ich nutze die Konfiguration 9 immer zum Messen und habe sie entsprechend im AcourateConvolver bezeichnet. In das Verzeichnis
c:\conf\9\1
speichere ich nun die oben erzeugten Frequenzweichenfiles.
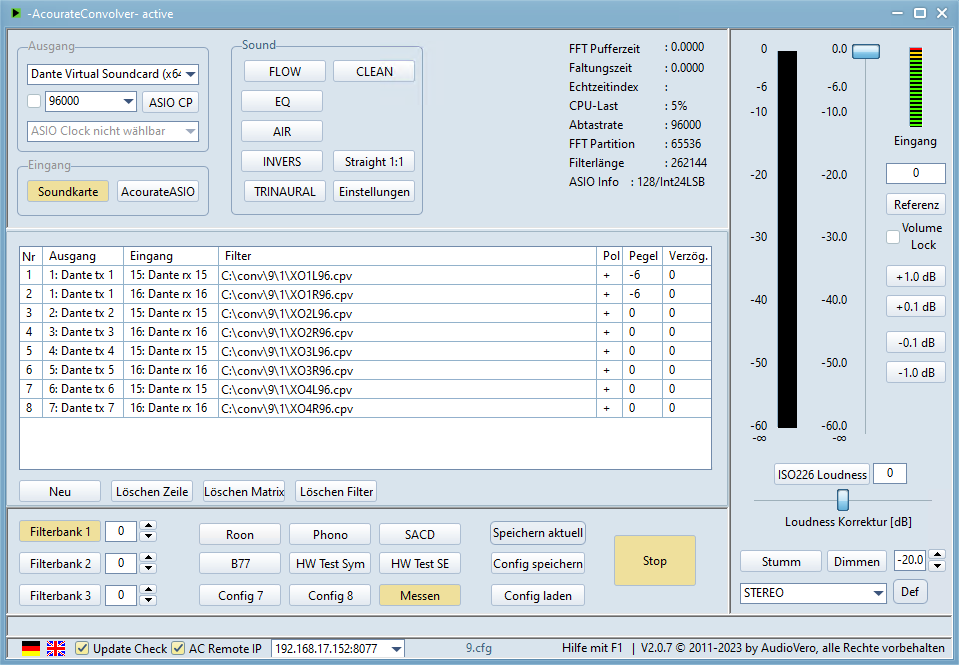
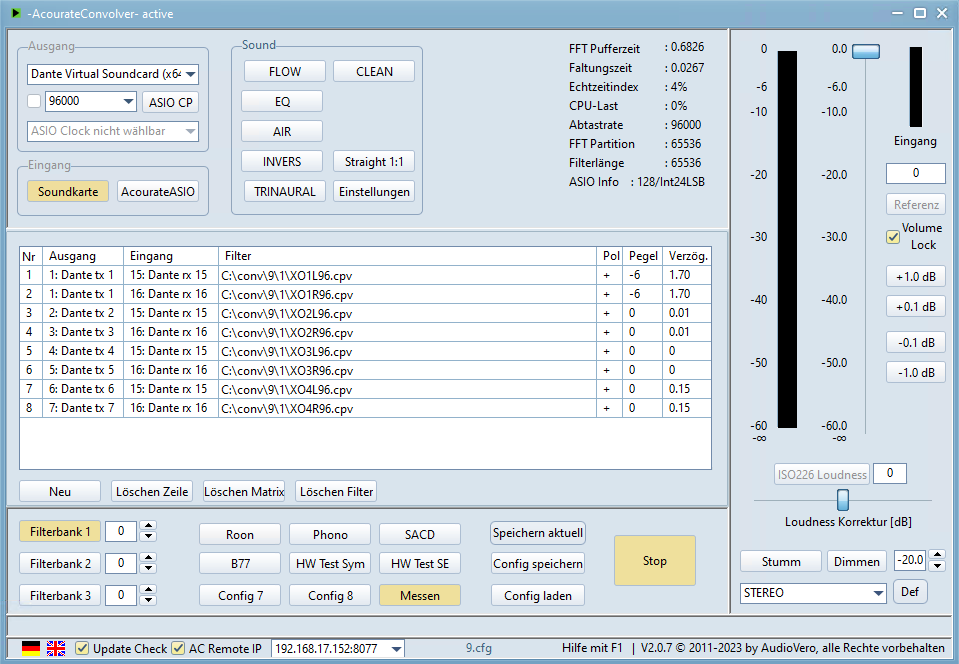
AcourateConvolver
Auf dem obigen Foto ist die Verbindungsmatrix zu sehen, die in meinem System zum Messen verwendet wird. Das Messsignal aus Acourate gelangt über die Dante-Eingangskanäle 15 und 16 in den AcourateConvolver. Die Audio-Kanäle für die Lautsprecher sind auf die Dante-Ausgänge 1 bis 7 geroutet.
Hier ist auch zu sehen, wie ein Mono-Subwoofer eingebunden wird. Die Signale aus beiden Bass-Kanälen (XO1*) werden mit einem um -6 dB verringerten Pegel auf den Ausgang 1 geroutet.
Ab diesem Zeitpunkt ist das System in der Lage, vernünftige Töne von sich zu geben!
Der AcourateConvolver basiert mathematisch auf einer Faltung. Er wendet auf ein Eingangssignal x(t) eine Impulsantwort h(t) an, um ein korrigiertes Ausgangssignal y(t) zu erzeugen:
Da die Signale digital, also zeitdiskret, vorliegen, wird die Faltung nicht durch ein Integral, sondern durch eine Summenbildung erzeugt.
x[n] ist das aktuelle Audio-Sample, h[k] sind die Filterkoeffizienten (Impulsantwort) und M ist die Länge des Filters.
Für jedes neue Sample muss das Signal mit der gesamten Impulsantwort multipliziert und aufsummiert werden.
Bei den langen Filterkoeffizienten, wie sie hier vorliegen, ist der Aufwand immens. Beim RQM-System mit seiner Samplerate von 96kHz und den sieben Ausgangskanälen ergeben sich dabei 672000 Samples (N) und damit mehr als 176 Milliarden Multiplikationen und Additionen pro Sekunde! Die Anzahl der Rechenoperationen berechnen sich aus
Die Lösung dieses Problems ist die Fourier-Transformation, da eine Faltung im Zeitbereich einer Multiplikation im Frequenzbereich entspricht.
Auch wenn das Signal zweimal transformiert werden muss, ist der Umweg über die Fourier-Transformation um Größenordnungen schneller. Hierfür gilt
Für das RQM-System reduziert sich die Anzahl der Operationen auf knapp vier Millionen pro Sekunde. Eine drastische Reduzierung!
Der Convolver führt dabei die folgenden Berechnungen durch:
Die Filterkoeffizienten liegen im Zeitbereich vor und werden beim ersten Start der Wiedergabe transformiert. Somit belastet diese FFT den Prozessor bei der laufenden Berechnung der Audiosignale nicht zusätzlich.
das Audiosignal wird transformiert (FFT)
es findet eine Multiplikation zwischen beiden transformierten Signalen statt (Audio & Filter)
das Ergebnis muß rücktransformiert werden (IFFT)
Hinzu kommt natürlich die Zeit, die benötigt wird, um die Audiosignale in den Rechner zu übertragen und wieder auszugeben.
Position des Messmikrofons
13. März 2024
Das Messmikrofon sollte sich bei allen Messungen
reproduzierbar an der gleichen Stelle befinden
exakt in der Mitte zwischen den beiden Lautsprechern platziert sein
Am besten man denkt sich ein System aus, wie man das Mikrofon bei der Aufstellung immer in die gleiche Position bringt.
Mein Hörraum hat eine Holzdecke. Meine Hörposition habe ich mit der Hilfe meines Freundes Heiner mit einem Kreuzlinienlaser exakt vermessen und bei dieser Position an der Decke einen Haken angebracht. An diesem hänge ich ein Lot, das eine Markierung auf der korrekten Höhe hat. Damit positioniere ich das Mikrofon schon einmal ziemlich genau an der richtigen Stelle im Raum.
Anschließend nimmt man Acourate zu Hilfe und benutzt die Funktion „Microphone Alignment“.
LogSweep -> Microphone Alignment
Damit lässt sich das Mikrofon auf den Millimeter genau in die Mittenposition bringen. Die Genauigkeit steigt dabei mit der Messfrequenz.
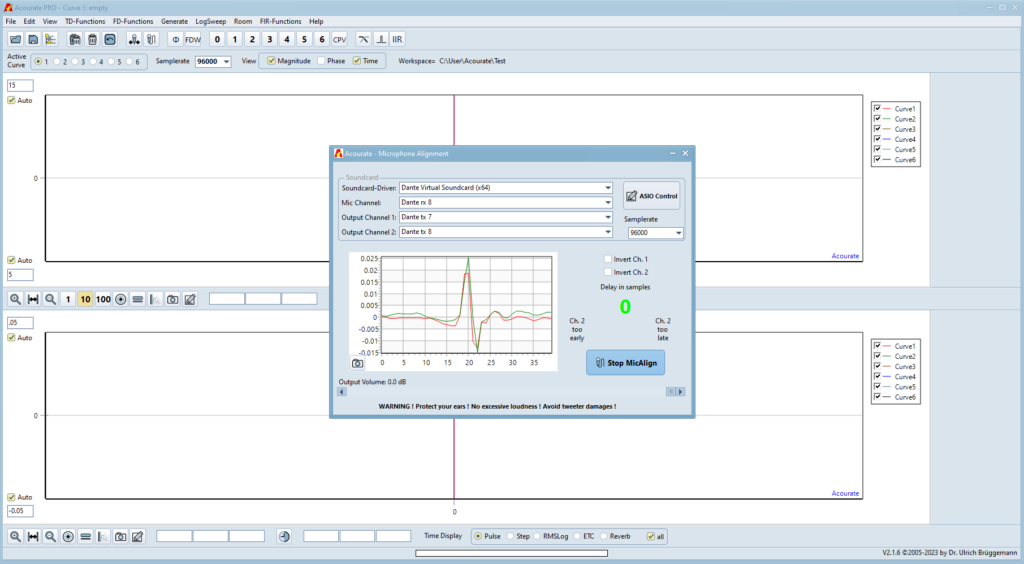
Acourate: Microphone Alignment
Wenn das Mikrofon exakt in der Mitte positioniert ist, erscheint im Fenster eine grüne 0. Das Prozedere ist selbsterklärend. Bei meiner Ausrichtungsmethode (siehe oben) muss ich das Mikrofon nur noch um wenige Millimeter nach links oder rechts bewegen.
Higher Output in Mic Alignment
The mic alignment is based on the time alignment of tweeters.
It does not make sense to use e.g. subwoofers for the mic alignment as the timing of low frequencies is too slow. Thus the signal recorded by the mic will also contain reflections influencing the accuracy. Whereas high frequency signals should have more precise transients.
Thus the test signal for the mic alignment consists of Dirac pulses processed by a highpass > 4 kHz. The left channel contains two clicks, the right channel one click. This also means that the left channel sound a bit louder than the right channel. This is ok and intended.
As the clicks are quite short signal the playback volume needs to be increased.
The alignment function now records the clicks and tries to trigger on the incoming pulses. This should properly work if – the recorded signal has enough level (dependent on playback volume and mic gain) – the recorded signal detects a clear impulse (strong reflections should be avoided) – the tweeters have the same polarity (I have experienced the opposite several times even with „high-end“ speakers).
The alignment function then displays the recorded signal in the chart. In addition at the right side of the chart there is a number displaying the timing difference in samples, the target is to get 0. In addition there is an arrow pointing to the left or right direction as a hint in which direction to move the mic. If the arrow points to the left direction the mic should be moved left as the sound travel time from left speaker is longer than from the right speaker. I highly recommend to move the mic stand. This is more sensitive than moving/turning the mic itself. By the movement into the displayed direction the number must count down. If it counts up the left/right channels are switched.
The optimum is reached when the display is 0 and the chart shows two peaks without flat top.
Für eine korrekte Messung müssen die Pegel abgeglichen werden. Es sollte nicht zu leise sein, aber es darf auch nicht übersteuern. Für die Wiedergabe nutze ich die Volume-Einstellung am Vorverstärker und für die Aufnahme den Verstärkungsfaktor des Mikrofoneingangs am Lynx-Wandler.
Bei einem Schalldruckpegel zwischen 80dB und 90dB ist die Frequenzausgeglichenheit des menschlichen Ohrs am größten. Mitch Barnett empfiehlt in seinem Buch einen mittleren Messpegel von 83dB. Ich habe damit gute Erfahrungen gemacht und mein System bei der Wiedergabe der Messsignale aus Acourate darauf eingemessen. Dafür benutze ich das günstige Schallpegelmessgerät PeakTech 5055, das ich bei dieser Messung auf „C-weight/slow” stelle.
In REW wird übrigens mit einem Pegel von 75dB gemessen (siehe Check Levels). Ich habe jedoch keine positiven Erfahrungen mit diesem geringeren Pegel gemacht. Die besseren Ergebnisse erziele ich mit den oben angegebenen 83dB.
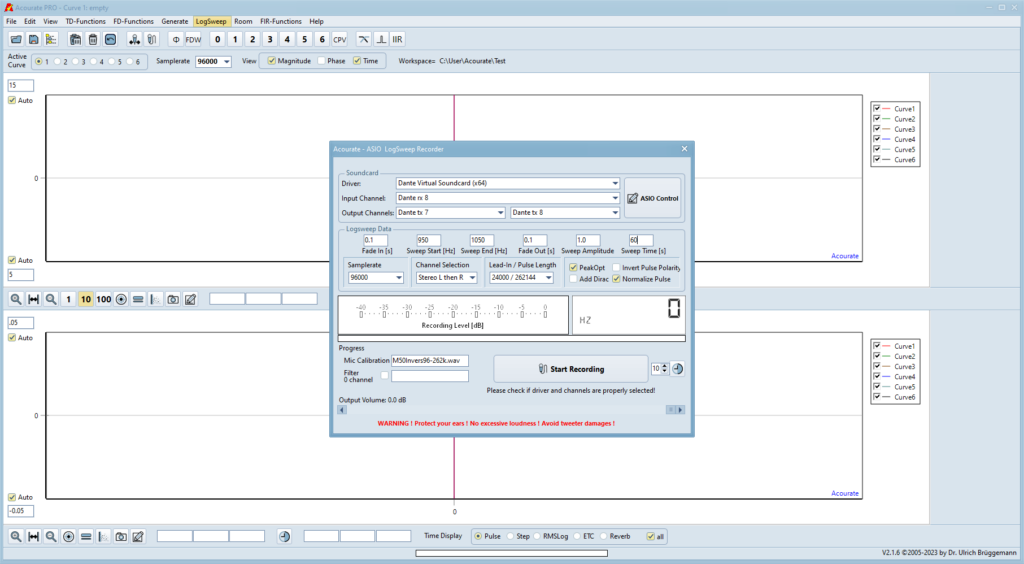
Da mein System ohne Optimierung sehr starke Pegelschwankungen aufweist, führe ich die Messung nur im Frequenzbereich von 950Hz bis 1050Hz mit einer Dauer von 60 Sekunden durch. Dazu halte ich das Schallpegelmessgerät an die Messposition des Messmikrofons. Anschließend stelle ich den Volume-Regler meines Vorverstärkers so ein, dass ich in etwa diesen Pegel erreiche. Da es auch bei dem schmalen Frequenzbereich Schwankungen gibt, muss ich „optisch” mitteln.
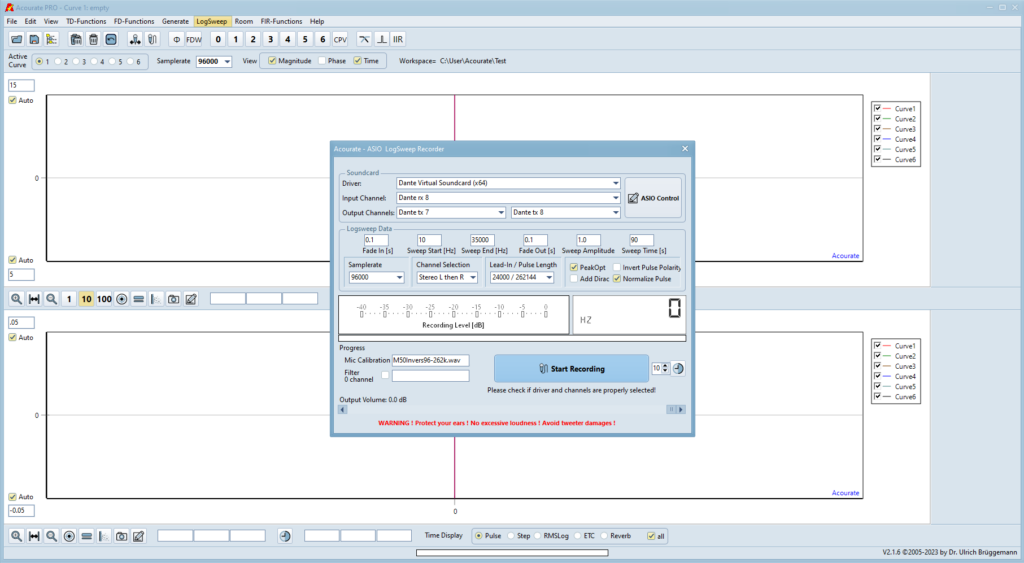
Acourate: LogSweep Messung
Ich messe mit einem Pegel von 0dB in Acourate und -20dB an meinem Vorverstärker.
Für diejenigen, die sich kein Schallpegelmessgerät leisten wollen oder es aktuell einfach nicht zur Hand haben, gilt es den Pegel nicht zu leise, aber auch nicht zu laut einzustellen. Dabei muss man sich auf sein eigenes Gehör verlassen. Auch ich habe lange mit dieser Methode die Grundeinstellung durchgeführt.
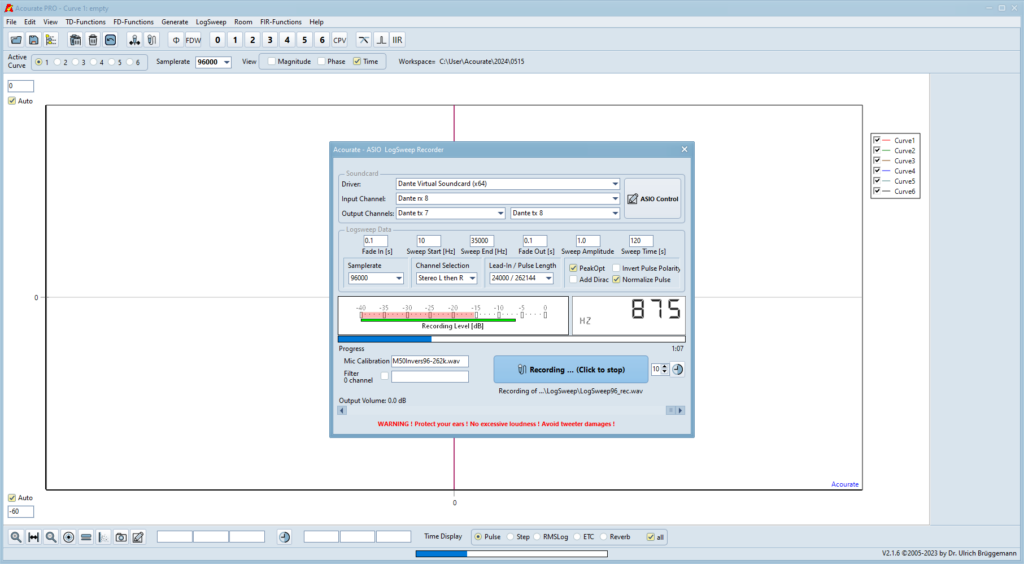
Anschließend lasse ich mit dem gefundenen Abspielpegel eine Messung über den ganzen Frequenzbereich laufen und stelle damit den Pegel des Mikrofonvorverstärkers ein. In Acourate wird über ein Laufband (grüner Balken) der maximal gemessene Eingangspegel angezeigt. Dieser sollte -6dB nicht überschreiten. Ein dB rauf oder runter ist nicht so entscheidend, ich achte aber darauf, dass ich unterhalb dieser Grenze bleibe. Es kann vorkommen, dass diese Messung zweimal durchgeführt werden muss.
Acourate: Eingangspegel der LogSweep Messung
Mein Mikrofonvorverstärker ist für das Earthworks M50 auf einen Verstärkungsfaktor von 35dB eingestellt.
Wenn sich an der Anlagenkonstellation nichts ändert und sich die Pegel reproduzierbar einstellen lassen, muss diese Messung nur einmal durchgeführt werden. Anschließend wird immer die ermittelte Konfiguration genutzt.
Pegel der Lautsprecher einstellen
14. März 2024
In einem Mehrwegesystem laufen die Lautsprecher an unterschiedlichen Endstufen. Wenn es sich nicht um das gleiche Fabrikat handelt, ist es sehr wahrscheinlich, dass sich die Verstärkungsfaktoren unterscheiden. Zudem sind Lautsprecher von Natur aus unterschiedlich laut.
Es ist sinnvoll, die Pegel der Lautsprecher im analogen Teil der Anlage aufeinander abzustimmen. In meinem System ist das besonders einfach, da ich im Vorverstärker jeden Kanal einzeln mit einer Korrektur beaufschlagen kann. Dabei achte ich darauf, dass meine Target-Kurve möglichst optimal eingefügt werden kann (siehe unten). Wenn man diesen Schritt auslässt, muss das Acourate besorgen. Dies kann jedoch auf Kosten des digitalen „Headrooms” gehen und man verliert mit hoher Wahrscheinlichkeit an Auflösung.
Meine Quads lasse ich dabei unkorrigiert, da sie mir den Grundpegel liefern. Ich passe also den RiPol und die Mundorfs an den Pegel der Quads an. Ein Vorteil meiner Lösung mit dem VV7 ist, dass ich nicht nur eine Abschwächung, sondern auch eine Verstärkung der einzelnen Pegel hinterlegen kann. Somit lassen sich die Lautsprecher in beide „Richtungen” korrigieren.
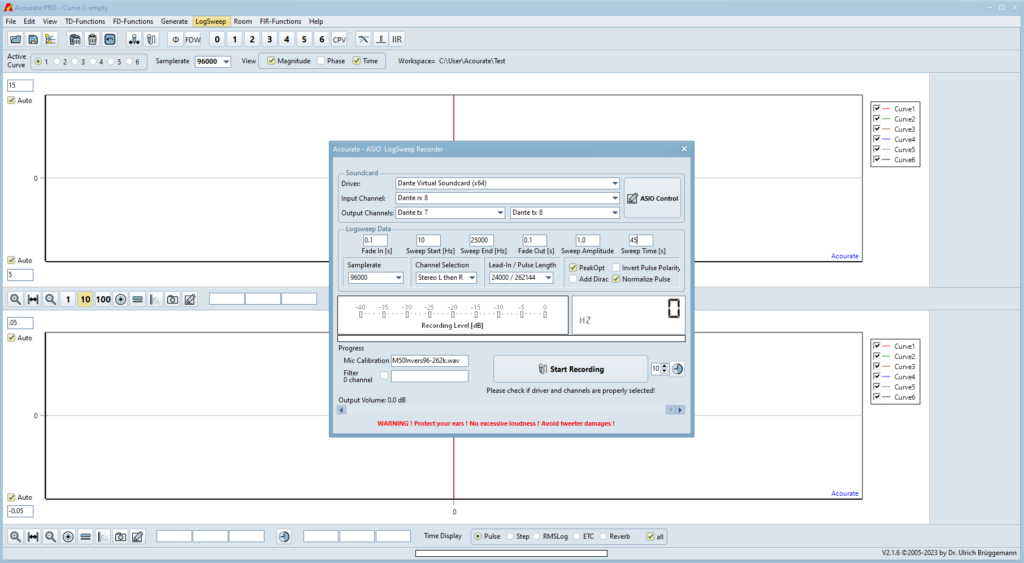
Um die Pegel zu ermitteln, wird eine Messung über den gesamten Frequenzbereich gestartet.
LogSweep -> LogSweep Recorder
Diese Messung muss nicht so exakt sein. Man kann sich bei der Messzeit auf kürzere Zeiten beschränken. Das Ergebnis wird anschließend noch mit Makro 1 geglättet. Die Ausgabe des ICCC nach der Messung kann einfach quittiert werden.
Room -> Macro 1
Die Parameter können auf den Standardwerten belassen werden.
Acourate: Room Macro 1
Bei gleichem Ausgangspegel am Vorverstärker ergibt sich für mein System der folgende Frequenzgang für alle Lautsprecher.
Acourate: unkorrigierte Pegel der Lautsprecher im RQM-System
Das Bild oben habe ich im Makro 2 gemacht und auch gleich meine Target Kurve (blau) eingefügt. So sieht man am besten, wovon ich hier schreibe. Die Erklärung hierzu gebe ich weiter unten. Wichtig an dieser Stelle ist, dass die Target Kurve möglichst weit oben liegt und vom eigentlichen Signal am besten gar nicht unterschritten wird.
Im Bassbereich habe ich eine Volumenkorrektur von +5dB vorgenommen. Die Mundorfs können bei 0dB bleiben. Damit erhalte ich nach der Glättung mit Makro 1 und dem Aufruf von Makro 2 das gewünschte Ergebnis.
Acourate: korrigierte Pegel
Nach dieser Einstellung muss unter Umständen der Messpegel noch einmal abgeglichen werden. Bei mir ist das jedoch nicht der Fall, da ich nur im Bereich von ca. 1kHz gemessen habe und die Quads im Pegel nicht verändere.
Bemerkung: Ich bin mir an dieser Stelle nicht wirklich sicher, wie herum man die Pegel abgleichen sollte. Beschrieben habe ich hier meine Vorgehensweise. Es wird aber sicherlich auch funktionieren, wenn man die beiden Einstellungen
Einstellung der Pegel bei der Messung
Pegel der Lautsprecher einstellen
in umgekehrter Reihenfolge durchführt.
Laufzeitkorrektur
27. März 2024
Einer der großen Vorteile einer digitalen Frequenzweiche ist die Möglichkeit, Signale zu verzögern. Dies wird genutzt, um die Laufzeiten der einzelnen Lautsprecher eines Mehrwegesystems so zu korrigieren, dass sie zeitgleich am Hörplatz ankommen (Time Alignment). Acourate bietet mehrere Möglichkeiten, um die dafür nötigen Verzögerungszeiten zu ermitteln.
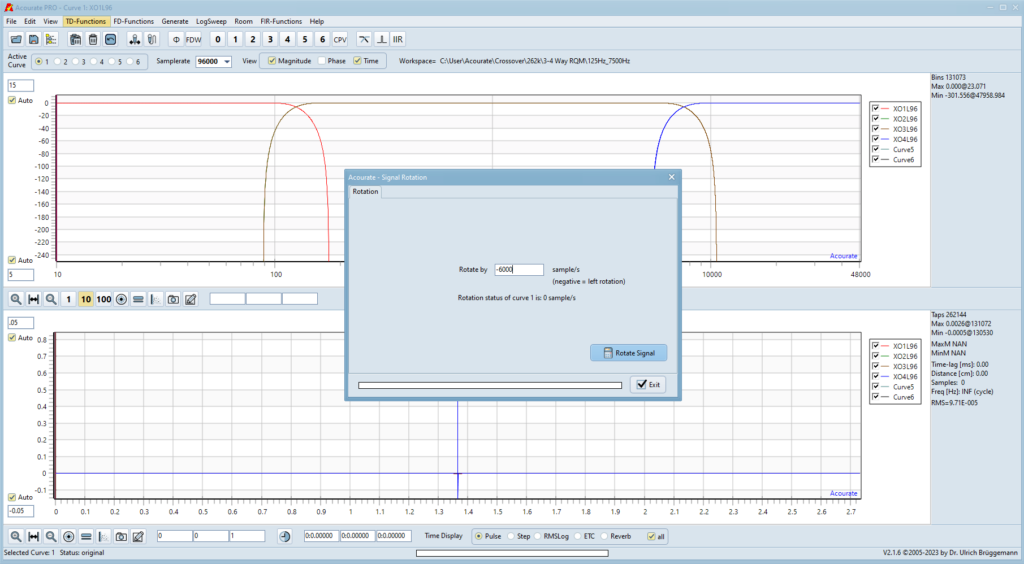
Bei dem hier beschriebenen Verfahren werden die einzelnen Files der Frequenzweiche zueinander verschoben. Dabei wird der Hochton (XO4*) als Referenz genommen und im originalen Zustand belassen. Der Tiefton (XO1*) wird um -6000 Samples, die oberen Quads (XO2*) um -2000 Samples und die unteren Quads (XO3*) um -4000 Samples verschoben.
Ein negativer Wert bei der Rotation verschiebt das Signal zeitlich nach vorne, sodass es früher wiedergegeben wird. Bei der Auswertung kommt der größte Impuls vom Hochtöner, der kleinste vom Subwoofer. Deshalb muss der Subwoofer so weit wie möglich nach vorne geschoben werden, um den Impuls eindeutig bestimmen zu können. Ansonsten würde das kleine Basssignal von den anderen vollständig überdeckt werden. Bei einer Abtastfrequenz von 96kHz sollten 2000 Samples zwischen den einzelnen Treibern liegen, um die Einzelimpulse zeitlich gut voneinander trennen zu können.
Die oben erzeugten Frequenzweichen-Files (XO*.dbl) werden in ein neues Verzeichnis kopiert. Dieses wird anschließend in Acourate als aktives Arbeitsverzeichnis ausgewählt. Alle noch angezeigten Kurven (Active Curve) sollten gelöscht werden.
Die Frequenzweichen-Files werden in die Kurven 1 bis 4 geladen. Da die Crossover-Files für den linken und rechten Kanal identisch sind, reicht es, nur die Files eines Kanals zu laden. Anschließend werden die entsprechenden Kurven mit
TD Functions -> Rotation
verschoben und als linkes und rechtes File abgespeichert. Im „Signal Rotation“-Fenster wird immer die aktuell aktive Kurve verschoben.
Acourate: Rotate des linken Basskanals
Die neu erstellten Frequenzweichen-Files (*.dbl) müssen nun noch in *.cpv Dateien umgerechnet werden.
Room -> Create CPV for AcourateConvolver
Anschließend werden sie auf den AcourateConvolver übertragen. Dafür nutze ich immer Filterbank 2 in meiner Konfiguration der Messung. Die Dateien landen also in dem Verzeichnis
c:\conf\9\2
Im AcourateConvolver wird nun „Config 9“ (Messen) und die „Filterbank 2“ selektiert. Anschließend muss noch die Matrix konfiguriert und die Einstellung abgespeichert werden (siehe Konfiguration des AcourateConvolver). Danach wird der Convolver mit dieser Konfiguration gestartet.
Nun ist es an der Zeit, eine erste Messung in Acourate durchzuführen. Hierzu sind die Pegel eingestellt, das Messmikrofon befindet sich an seiner Position und ist exakt mittig ausgerichtet (siehe oben). Mit
LogSweep -> LogSweep Recorder
wird eine Messung gestartet.
Acourate: LogSweep zur Laufzeitmessung
Nach der Messung erscheint erst einmal die Ausgabe für die Interchannel Cross Correlation (ICCC). Zum jetzigen Zeitpunkt kann man einfach auf „ok“ drücken und das Fenster schließen. Uns interessiert aktuell nur die zeitliche Auswertung der Messung. Aus diesem Grund kann man am oberen Bildschirmrand von Acourate außer „Time“ die beiden anderen Messwertausgaben deaktivieren.
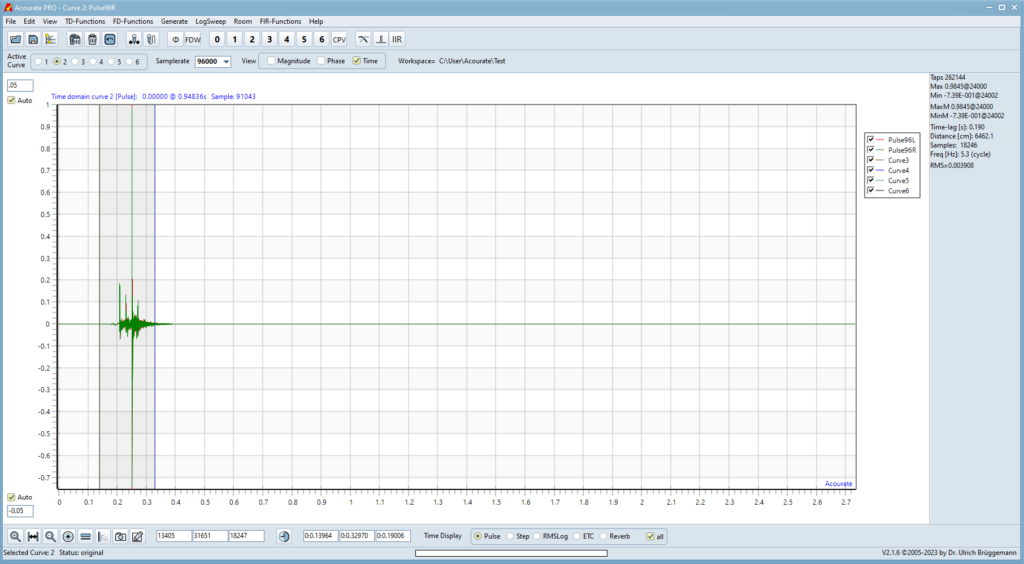
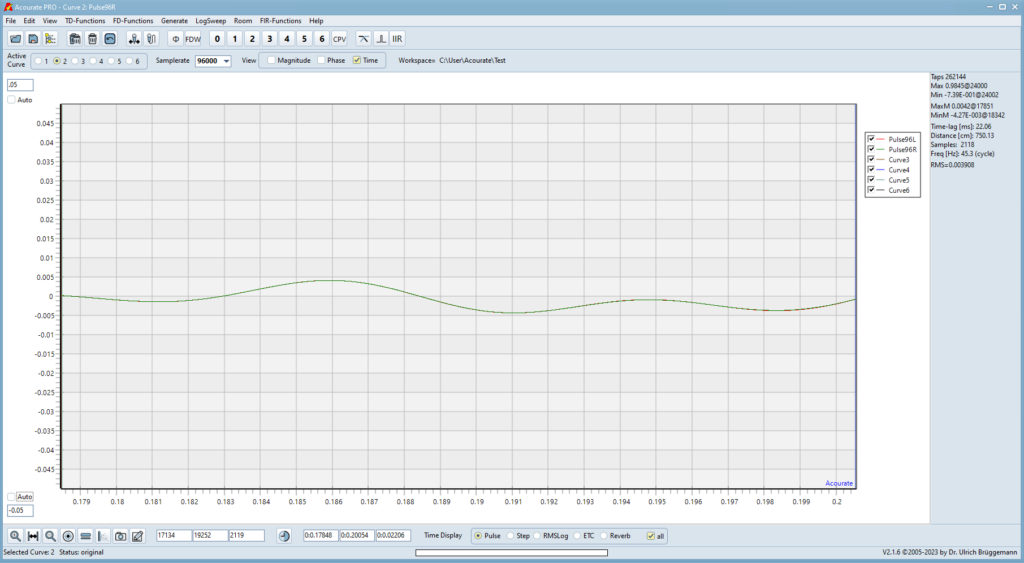
Acourate: Laufzeitmessung
Der größte Impuls ist der Hochton, die beiden kleineren davor der Mittelton (Quads oben und unten) und kaum zu erkennen, die kleinen Wellen davor, der Bass. Hätten wir eine perfekte zeitliche Abstimmung zwischen den einzelnen Lautsprechern, dann wären die Impulse des Mitteltones exakt 2000 und 4000 Samples vor dem des Hochtones und entsprechend läge der Bass 6000 Samples davor. Die Abweichungen davon sind die gesuchten Zeiten.
Die Messung habe ich mit 262144 taps durchgeführt (Pulse Length). Das führt zu einem Lead-in von 24000 Samples (siehe LogSweep oben). Den größten Impuls stellt Acourate genau an dieser Stelle dar.
Acourate: Laufzeit Messung, Time gezoomt
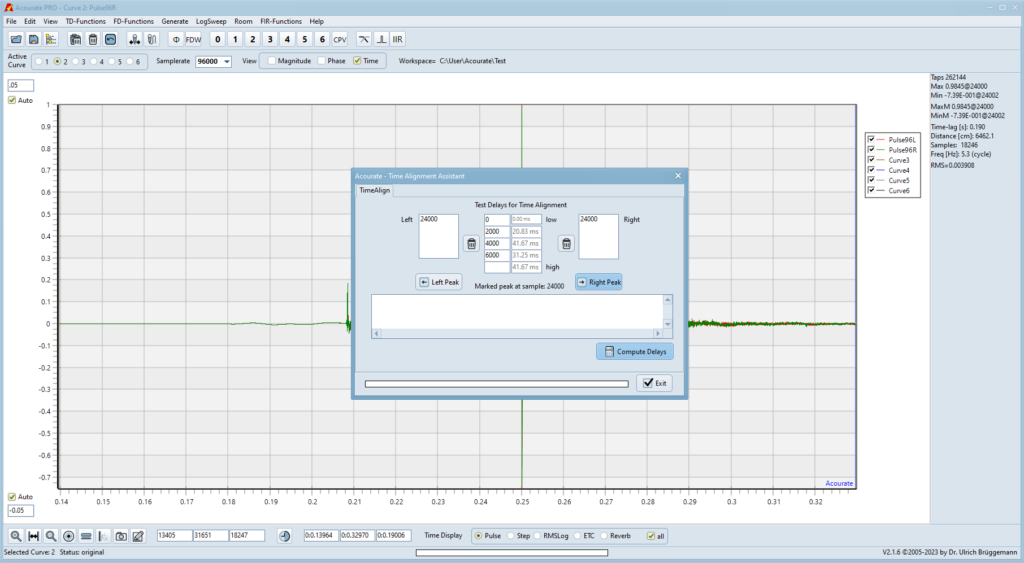
Mittig links unterhalb des Zeitfensters befindet sich ein Uhren-Icon. Damit öffnet man den „Time Alignment Assistant“. Allerdings gibt es eine kleine Eigenart meines Acourate: Erst wenn man im Zeitfenster die Signale gezoomt hat, kann man den Assistenten auch wirklich öffnen.
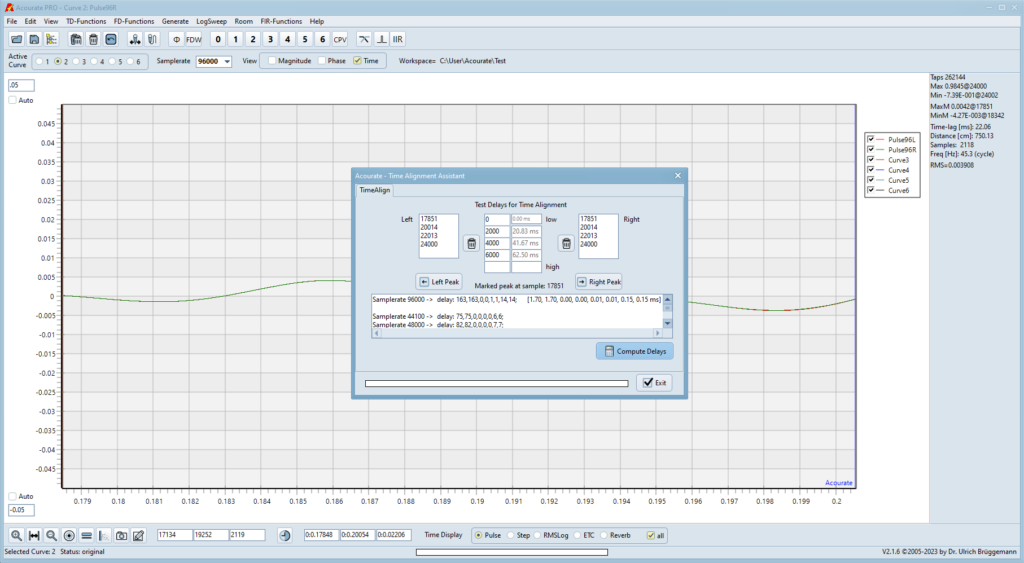
Acourate: Time Alignment Assistant
In „Test Delays for Time Alignment“ werden die oben gemachten Verschiebungen eingetragen, in diesem Fall also 0, 2000, 4000 und 6000 Samples. Durch einen Klick auf „Left Peak“ und „Right Peak“ wird die Position (in Samples) des größten Impulses in den Fenstern „Left“ und „Right“ übernommen. Da im Moment das komplette Signal dargestellt wird, muss auf beiden Seiten 24000 erscheinen.
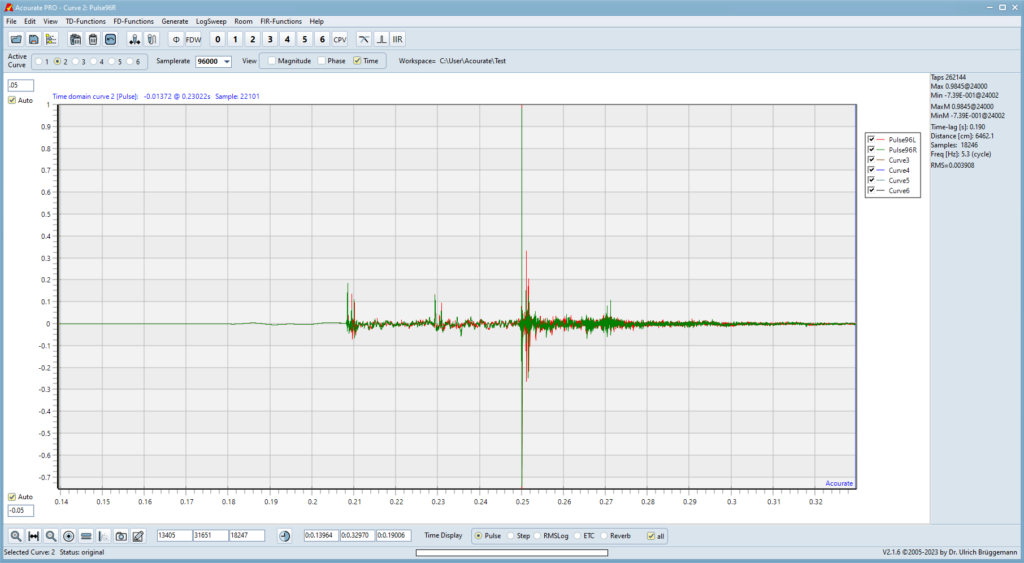
Anschließend wird der Assistant mit „Exit” verlassen und die Messung so gezoomt, dass nur noch der Impuls 2000 Samples vor dem Hochtonimpuls zu sehen ist. Das entspricht in etwa 21ms. Die Mitte der dargestellten x-Achse sollte also bei etwa 0,229s liegen. An den Rändern der Darstellung darf es auch keinen größeren Impuls geben!
Acourate: Laufzeit Impuls bei -2000 Samples
Nun geht es erneut in den „Time Alignment Assistant“. Ein Klick auf „Left Peak“ bzw. „Right Peak“ übernimmt auch hier wieder die Position des aktuell größten dargestellten Impulses. Bei mir sind es 22013 Samples in beiden Kanälen. Die Abweichung von 22000 Samples entspricht der gesuchten Zeitverschiebung.
Das gleiche Spiel machen wir nun auch noch bei den beiden Impulsen um die 0,208s herum (4000 Samples).
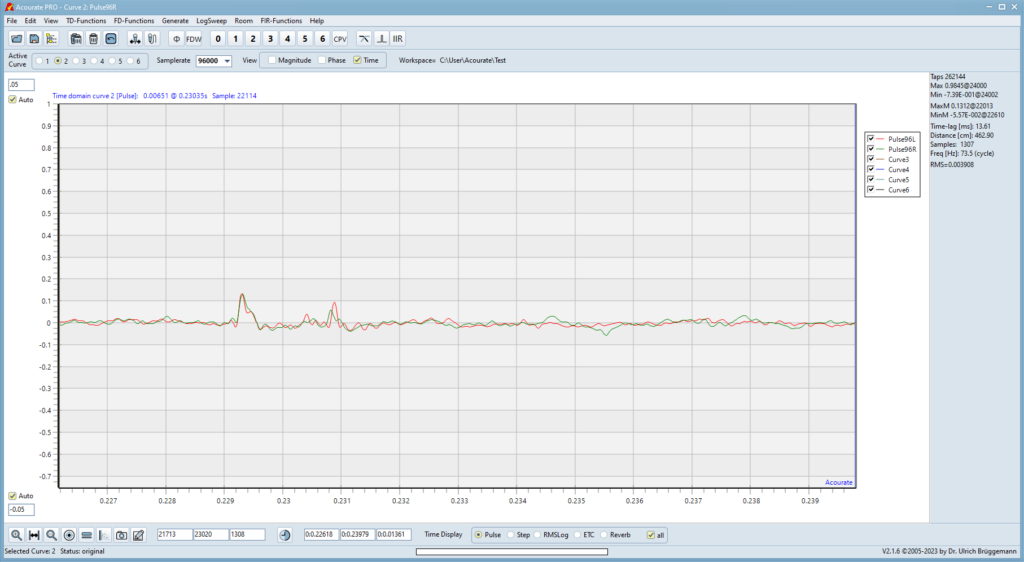
Weiter geht es mit dem Bassimpuls. Auch hier muss der Bereich zunächst entsprechend gezoomt werden. Allerdings ist der Bassimpuls sehr klein und deshalb schlecht zu erkennen. Wir wissen jedoch, dass er bei ca. 0,187s liegen muss, also 6000 Samples vor dem Hochtonimpuls. Um den Impuls aber halbwegs gut erkennen zu können, habe ich die y-Achse von „Auto“ auf ±0,05 gestellt.
Acourate: Laufzeit Bass Impuls
Ein letztes Mal geht es nun in den Assistant. Der Impuls wird wie gewohnt in die Fenster auf der linken und rechten Seite übernommen. Anschließend kann die Auswertung erfolgen, die Acourate dankenswerterweise übernimmt. Mit einem Klick auf „Compute Delays” erhält man abschließend:
Acourate: Auswertung Laufzeitmessung
Wir sehen, dass der Bass um 1,70ms verzögert werden muss. Die unteren Quads werden hingegen nicht verzögert. Die oberen Quads werden nur geringfügig um 0,01ms verzögert. Die Hochtöner müssen hingegen um 0,15ms gegenüber den unteren Quads verzögert werden. Diese Werte werden in die Übertragungsmatrix des AcourateConvolver (Config 9 / Filterbank 1) eingetragen.
AcourateConvolver mit eingetragenen Verzögerungszeiten
Die Werte sind schlüssig, der Mono-Subwoofer steht in der Mitte und somit am nächsten zu meinem Hörplatz. Auch die Hochtöner sind etwas näher an der Hörposition. Folglich müssen diese Kanäle verzögert werden.
Allerdings hatte ich Probleme, die Werte zu interpretieren und so nahm ich mir Papier und Bleistift und rechnete es nach.
Berechnung der Laufzeitverzögerungen aus den ermittelten Werten.
Der Impuls der oberen Quads startet bei 22013 Samples, sollte aber bei 22000 Samples anfangen. Der Impuls der unteren Quad startet bei 20014 Samples, sollte aber bei 20000 Samples anfangen. Alle vier Quads starten also zu spät. Der Impuls des Tieftons startet bei 17851 Samples, sollte aber bei 18000 Samples anfangen. Der Tiefton setzt somit zu früh ein.
Als Erstes werden die Verschiebungen in den Signalen von den Ergebnissen subtrahiert – händisch (TD Functions → Rotation) und von Acourate (24000):
Positive Werte bedeuten hier also eine verzögerte und negative eine verfrühte Reaktion.
Um das RQM-System nun zeitlich richtig zu korrigieren, muss der Tiefton um 149 Samples verzögert und die Signale der Quads 13 bzw. 14 Samples früher übertragen werden. Allerdings ist es nicht möglich, ein Signal früher abzuspielen – dafür müsste das System in die Zukunft schauen können. Digitale Signale lassen sich hingegen sehr leicht verzögern.
Die Lösung besteht nun darin, alle Lautsprecher um den größten positiven Wert der oben ermittelten Samples, hier also 14, zu verzögern.
Nun sind alle zeitlichen Verschiebungen ≤0 Samples. Die Signale bleiben also gleich (0 Samples) oder müssen verzögert werden (<0 Samples). Dieses Ergebnis ist auch oben im „Time Alignment Assistent“ Fenster zu sehen.
Das größte Problem bei dieser Methode ist der sehr geringe Bassimpuls. In meinem Fall war das Auffinden des Maximums noch relativ einfach. Bei anderen Lautsprecheraufbauten ist dies jedoch unmöglich. Dann kann das im Acourate-Wiki beschriebene Verfahren genutzt werden (Link siehe oben).
Ab diesem Zeitpunkt haben wir ein zeitlich perfekt abgestimmtes Mehrwegesystem!
Messung der Lautsprecher im Raum
07. Januar 2023
Nun sind wir so weit, die Messung der Lautsprecher im Raum durchzuführen. Hierzu legen wir zunächst ein neues Verzeichnis an, das dann in Acourate als aktives Arbeitsverzeichnis festgelegt wird. Anschließend werden alle Kurven in Acourate gelöscht. Das Mikrofon befindet sich auf seiner Messposition und die Pegel am Vorverstärker sowie am Mikrofonverstärker sind eingestellt.
Zur Sicherheit überprüft man zunächst noch einmal, ob sich das Mikrofon wirklich exakt in der Mitte befindet.
LogSweep -> Microphone Alignment
Dies ist schnell erledigt und dient der Sicherheit. Befindet sich das Mikrofon nicht an der exakten Position, sind die Messergebnisse nicht wirklich zu gebrauchen.
Auf dem AcourateConvolver läuft die zeitlich korrigierte Frequenzweiche. Bei mir also Config 9 (Messen) / Filterbank 1 mit eingetragenen Verzögerungszeiten.
LogSweep -> LogSweep Recorder
Während der Messung kann man ruhig im Raum bleiben, da man sich ja auch beim Hören der Musik dort aufhält. Allerdings sollte man seitlich stehen. Das Dreieck linker Lautsprecher – rechter Lautsprecher – Messmikrofon muss frei sein.
Bei mir steht auch im normalen Betrieb nichts zwischen mir und meinen Lautsprechern. Sollte man dort z.B. einen Tisch oder etwas ähnliches stehen haben, ist es nach Aussage von Mitch Barnett sinnvoll, diesen zur Seite zu stellen. Es bringt offensichtlich bessere Ergebnisse, auch wenn der Tisch anschließend wieder an diese Position gestellt wird. Es ist auf jeden Fall einen Versuch wert.
Acourate: LogSweep Messung
Die Messung für einen Kanal läuft bei mir 90s. Das ist ziemlich lange, erhöht aber das Signal-Rausch-Verhältnis. Ich messe von 10Hz bis 35kHz um an die Übertragungsgrenzen meiner Lautsprecher zu kommen. Für Lead-In / Pulse Length ist 24000 / 262144 ausgewählt. Die Messung erfolgt also mit der größtmöglichen Anzahl an taps.
Nach der Messung erscheint erst einmal das Fenster mit den Interchannel Cross Correlation (ICCC) Ergebnissen (mehr dazu weiter unten). Zum jetzigen Zeitpunkt sollte man die Ausgabe einfach quittieren.
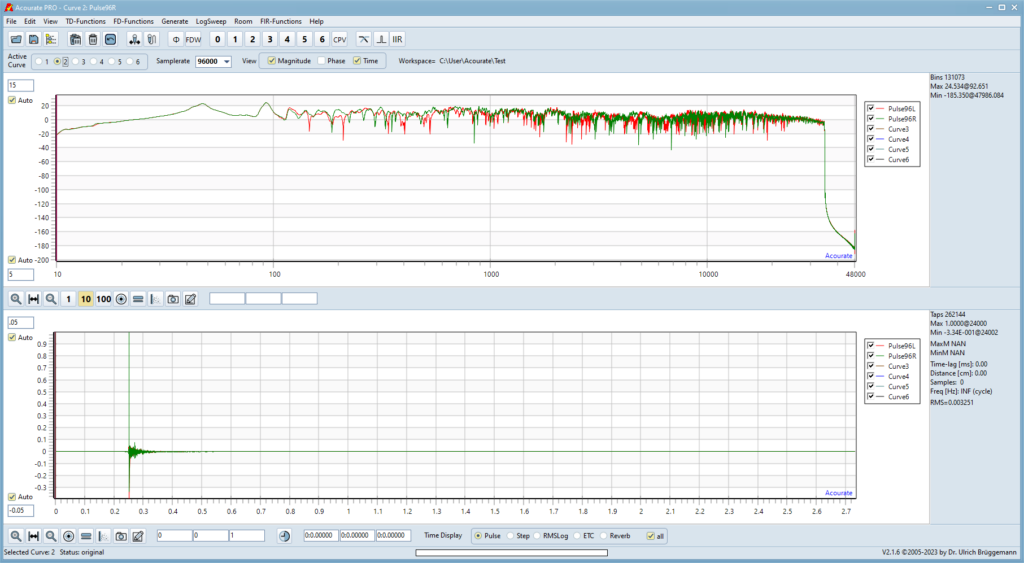
Acourate: Ergebnis der Messung
Mit diesen Messwerten geht es nun in die Optimierung des Systems Lautsprecher / Raum. Die Messungen findet man in 2 Dateien (Puls96L.dbl & Puls96R.dbl) im aktuellen Arbeitsverzeichnis. Für die Weiterverarbeitung sind in Acourate Makros hinterlegt, die im Folgenden abgearbeitet werden. Diese Makros sind ungemein hilfreich und führen sehr schnell zu beeindruckenden Ergebnissen.
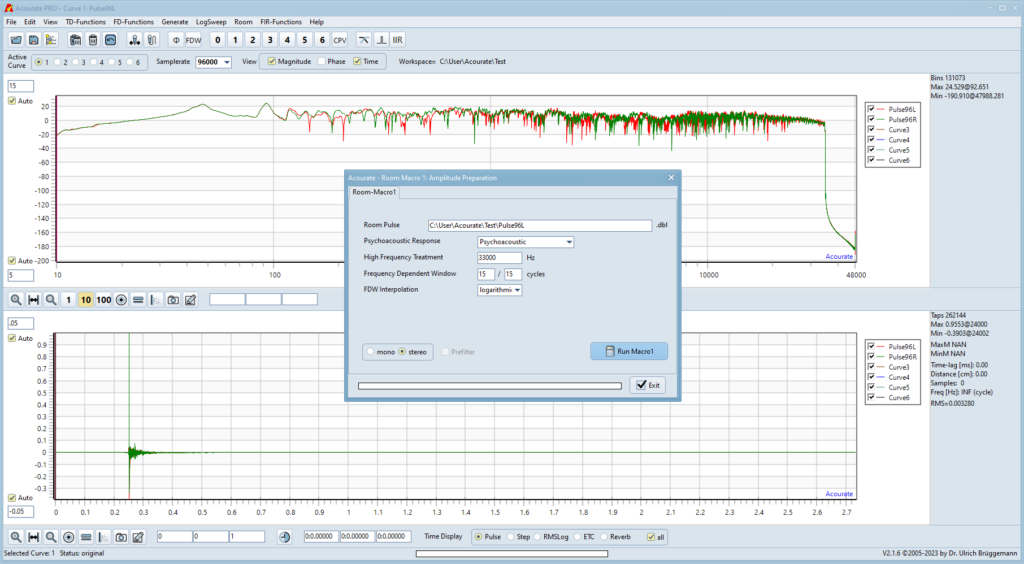
Room Macro 1 / Aufbereitung der Amplitude
03. Juli 2026
Die Pulsantworten der Messung müssen als erstes aufbereitet werden. Sie enthalten viele Informationen, die für die Erstellung der Korrekturfilter nicht benötigt werden. Mithilfe dieses Makros wird der Frequenzgang geglättet und nur der erste eintreffende Schall durch Verwendung eines Zeitfensters (FDW – Frequency Dependent Windowing) in die weitere Berechnung mit einbezogen. Durch den Aufruf von
Room -> Macro1
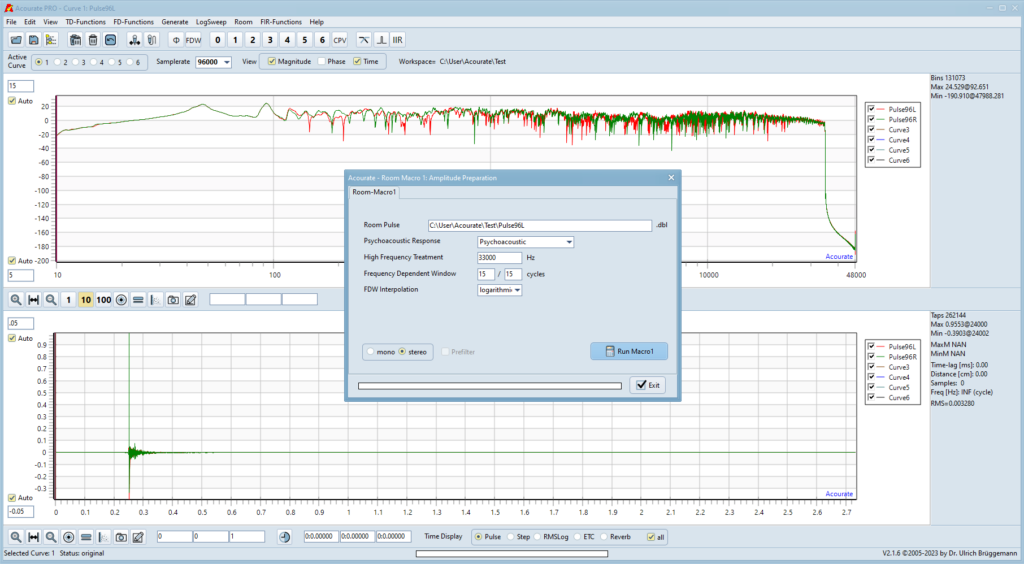
öffnet sich die folgende Eingabemaske.
Acourate: Room Macro 1
Die angegebene Datei unter „Room Pulse“ zeigt beim Aufruf auf das Messfile des linken Kanals. Hier gibt es in der Regel nichts zu selektieren.
Mit dem Auswahlmenü „Psychoacoustic Response“ hat man die Wahl zwischen „Psychoacoustic“ und „Sliding 1/12-octave analysis“. Es wird empfohlen, die Default Einstellung zu belassen. Ich habe an dieser Stelle auch nie etwas anderes ausprobiert.
Bei „High Frequency Treatment“ sollte eine Frequenz 1 oder 2kHz unterhalb der maximal verwendeten Messfrequenz eingeben werden. Ab dieser Frequenz wird das Signal bei der Invertierung (siehe unten) einfach nur noch linear fortgeführt. In der Regel erhält man einen starken Signalabfall bei der maximalen Messfrequenz. Dieser wird durch die Invertierung in einen starken Anstieg transformiert. Ein Verhalten, das wir nicht gebrauchen können. Durch die Funktion wird dieses Signalverhalten unterbunden. Ich gebe an dieser Stelle einen Wert 2kHz unter der maximalen Messfrequenz an, hier also 33kHz.
Mit der Auswahl bei „Frequency Dependent Windowing“ hat man einen größeren Einfluss auf das spätere Ergebnis. Mit den beiden Zahlen gibt man die Länge des Zeitfensters für die Mittelung ein. Der erste Wert gilt für die unterste und der zweite für die oberste gemessene Frequenz. Acourate passt dann die Fensterung zwischen diesen beiden Werten über den Frequenzverlauf gleichmäßig an.
Ich habe sehr viel mit diesen Parametern experimentiert. Heute verwende ich jedoch die Standardwerte 15/15.
Acourate Makro 1 FDW – Was ist damit gemeint?
Die frequenzabhängige Fensterung wird bei Acourate mit einem Faktor definiert, der die Fensterbreite nicht per direkter Zeitangabe sondern per Anzahl der Frequenzzyklen angibt. Bei 100 Hz ist die Zykluszeit 10 ms. Ein Faktor 5 bedeutet somit eine Fensterbreite von 5 Schwingungen mit 50 ms. Bei 10 kHz wäre das entsprechend eine Fensterbreite von 0.5 ms. Innerhalb dieser 0.5 ms sind von den 100 Hz gerade mal 1/20 der Zykluszeit „angeschwungen“. Daher die Fensterbreite in Abhängigkeit von der Frequenz. Was nach dem Fenster kommt spielt keinerlei Rolle mehr.
Warum macht man das Ganze überhaupt: es geht eigentlich nicht um eine geglättete Frequenzgangkurve, die fällt als Nebenprodukt mit ab. Man möchte den Direktschall von den Raumeinflüssen trennen. Zumindest von den späten Einflüssen. Was interessiert mich was der Raum in 1 Sekunde noch von sich gibt wenn das direkte Musikereignis wichtig ist. Es macht auch keinen Sinn jetzt schon etwas zu korrigieren damit es am nächsten Tag richtig spielt. Die zugegeben extreme Betrachtung zeigt einfach auf, dass man das Klanggeschehen um den Direktschall herum betrachtet. Würde hingegen der reine Direktschall behandelt, würde man „bloss“ den Lautsprecher korrigieren und den Raum mit seinen oft negativen Einflüssen (z.B. Raummoden) aussen vor lassen.
Und so schaut man sich eben bei der Raumkorrektur ein Gemisch aus Direktschall und Raumanteil an. Der FDW-Parameter erlaubt das zu kontrollieren. Mit obigem Beispiel kann man also z.B. 5 Schwingungen bei jeder Frequenz betrachten und nicht beispielsweise 5 Schwingungen bei 100 Hz und 500 Schwingungen bei 10 kHz wenn die Fensterbreite konstant über alle Frequenzen wäre.
Je breiter das Fenster nun ist (bzw. je höher der FDW-Faktor) umso mehr Raumanteil fliesst mit ein. Bei sehr großen Werten wird logischerweise der Hörplatz mehr festgenagelt weil ja eine Änderung der Hörposition ja auch Änderungen des Raumanteils mit sich bringt. Das Fazit heisst: KOMPROMISS, KOMPROMISS, KOMPROMISS ! Ist man der einzige Hörer (bei vielen der Fall) und ist dabei der Sitzplatz fest (sweet spot) kann man mehr korrigieren.
Acourate macht per default eine Vorgabe von 15. Wer es mag kann aber auch 3, 10, 25 oder 12.7369 verwenden. Da das resultierende Ergebnis aber eben auch vom Raum abhängt gibt es definitiv keinen optimalen Wert, allenfalls Empfehlungen. Es sollte klar sein, dass bei niedrigen Frequenzen die Fensterbreite bei gleichem FDW-Faktor größer ist als bei hohen Frequenzen. Ob man nun die Breite untenrum noch vergrößert (10/5) oder obenrum (5/10) muss man für sich probieren und testen.
Das letzte Auswahlmenü ist „FDW-Interpolation“. Ich belasse die Einstellung dort immer auf „logarithmic“.
Sind alle Parameter wunschgemäß angegeben, drückt man den Button „Run Macro1“. Acourate berechnet die Glättung und gibt das Ergebnis anschließend aus.
Acourate: Geglätteter Amplitudenverlauf
Mit dem Ergebnis kann man mehr anfangen als mit der eigentlichen Pulsantwort oben. Man sieht an dieser Stelle sehr schön den unkorrigierten Frequenzgang der Lautsprecher im Raum.
Partielle Korrektur mit FDW
Ab der Acourate-Version 3.3 gibt es eine Erweiterung bei der Eingabe der FDW-Werte im Makro 1. Obwohl ich diese Version aktuell nicht zur Verfügung habe, möchte ich an dieser Stelle trotzdem darüber berichten. Daher folgt hier einfach ein Zitat der Beschreibung:
Acourate V3.3 – Partielle Korrektur und FDW
Es wird ja gerne diskutiert ob eine „Raum“korrektur den gesamten Frequenzbereich korrigieren soll oder nur einen unteren Bereich bis hin zur etwas ominösen Schröder-Frequenz (siehe auch Wikipedia).
Nun, es kommt hier noch ein anderer Faktor dazu und es macht m.b.M.n. Sinn das dann zusammen zu betrachten. Die Invertierung eines originalen Frequenzgangs (der im übrigen einen eingeschwungenen Zustand beschreibt, wobei Musik aber typischerweise nicht eingeschwungene Zustände darstellt) bringt schnell mathematische Probleme mit sich (schön mit ill-conditioned beschrieben). Daher werden Frequenzgänge gerne vorher geglättet.
Ein hervorragendes Verfahren ist hierbei die frequenzabhängige Fensterung FDW (frequency dependent windowing). Sie besagt, welcher Zeitabschnitt für eine gegebene Frequenz ausgewertet wird und wird üblicherweise in Zyklen angegeben. Bei 1kHz ist die Zykluszeit 1ms und 5 Zyklen definieren damit eine Fensterbeite von 5ms. Die Fensterbeite bei 20Hz ist dabei schon 250ms. Das kann man sich dann auch prima vorstellen, dass eben wie im Beispiel die ersten 5 Schwingungen herangezogen werden. Nachfolgende Schwingungen werden unterdrückt. Man bewertet damit auch den wichtigen Bereich des Einschwingens bei der Pulsantwort.
Nun macht es wiederum Sinn die Schallgeschwindigkeit mit in die Betrachtungen einzubeziehen. Bei den 250ms legt der Schall schon 85m zurück, im Wohnzimmer gibt es dann schon reichlich Reflexionen (oder das schöne Wort Schallrückwürfe). Bei 5ms sind es gerade mal 1.7m, definitiv weniger Schallweg. Was dazu führt, dass man mit FDW bei niederigeren Frequenzen mehr Reflexionen und damit den Raum einbezieht. Wohingegen bei höheren Frequenzen wird der Raum immer weiter ausgeblendet, man betrachtet hier lediglich das Verhalten des Lautsprechers.
Das führt zur Erkenntnis, dass die Raumkorrektur eine Mischung aus Raum- und Lautsprecherkorrektur darstellt. Und wenn nun der LS so gut ist, dass ich ihn überhaupt nicht korrigieren will?
Die 100%ige Methode ist, in der Korrektur oberhalb einer gewählten Frequenz einfach den Frequenzgang horizontal glatt zu setzen. Das klappt definitiv, bringt aber noch die Problematik mit sich, wie man den Übergang zwischen korrigiert und nicht korrigiert sauber hinbekommt. Ebenfalls sind die Pegeleinflüsse der beiden Bereiche passend zu kombinieren.
Der bisherige Ansatz in Acourate war es, nicht nur einen konstante FDW über den gesamten Frequenzbereich vorzugeben, sondern auch zu erlauben, dass man zwei Werte, also einen FDW-Wert für eine untere Frequenz und einen zweiten FDW-Wert für eine obere Frequenz vorgibt. Dazwischen wird dann für jede Frequenz ein passender Wert interpoliert.
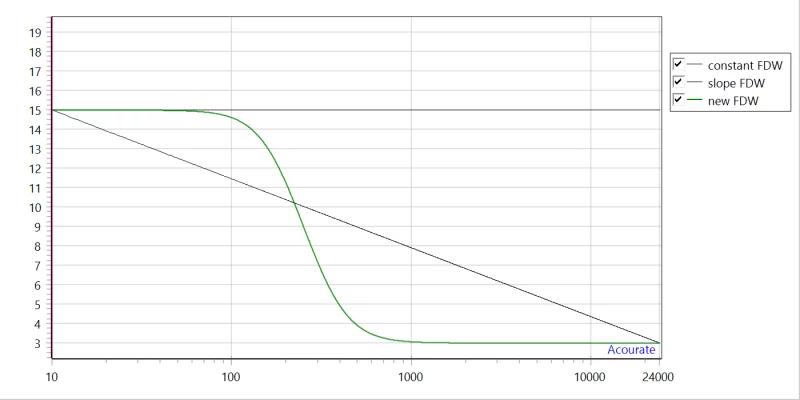
Das ist einmal dargestellt für ein konstantes FDW 15 / 15 und ein interpoliertes FDW 15 / 3 (schwarze Kurven):
Die neueste Acourate-Version V3.3 erlaubt darüber hinaus nun auch die Vorgabe eines Lowshelf-Profils. Das Bild zeigt nun mit der grünen Kurve ein FDW-Profil welches bei einer Eckfrequenz von 250Hz mit der Vorgabe von 15 / 3 bis 100Hz ca. 15 Zyklen fenstert und dann nach der Übergangsphase ab 1kHz nur noch 3 FDW-Zyklen verwendet. Eckfrequenz und Güte sind hierbei auch wählbar, der niedrigste FDW-Wert ist 1 Zyklus.
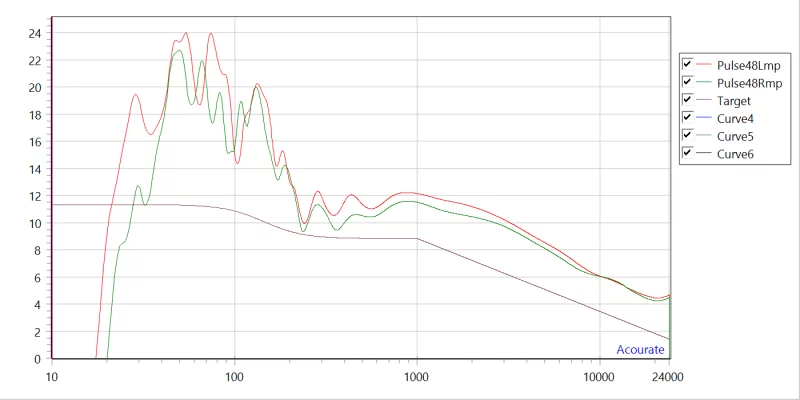
Als Beispiel sei noch das Ergebnis von Macro1 + 2 für ein beliebiges Messergebnis dargestellt. FDW ist 15 / 1. Korrekturen passieren hier im wesentlichen im unteren Frequenzbereich, im oberen Bereich erfolgt noch im wesentlichen eine sanfte Pegelanpassung links/rechts.
Um die oben beschriebene neue Funktion nutzen zu können, muss im Pull-Down Menü „FDW Interpolation“ der Punkt „shelf profile“ ausgewählt werden.
Betrachtet man den unkorrigierten Frequenzgang meines RQM-Systems und berücksichtigt dabei, dass meine höchste Übergangsfrequenz erst bei 7,5kHz liegt, sehe ich keinen Sinn darin, mein System nur im unteren Frequenzbereich zu korrigieren.
Ich kann mir aber durchaus vorstellen, dass es Lautsprecher gibt, bei denen eine solche Korrektur zum Erfolg führt.
Room Macro 2 / Target Kurve
02. April 2024
Mit diesem Makro geht es in den entscheidenden Schritt, die Bestimmung der eigenen Target Kurve. Mithilfe dieser Kurve wird der gewünschte Zielfrequenzgang des Systems festgelegt. Es gibt vielfältige Möglichkeiten, diese Kurve zu bestimmen, und in der Anfangszeit wird man auch einiges ausprobieren wollen – so war es zumindest bei mir. Eine ideale Target-Kurve gibt es nicht. Sie richtet sich nach dem Raum, den Lautsprechern und dem persönlichen Geschmack.
Die Firmen Harman International und Brüel & Kjær haben Untersuchungen zu einer optimalen Targetkurve durchgeführt. Die Kurven sind schnell im Internet zu finden.
Für die erste Kurve wird ein linearer Frequenzgang bis 1kHz (Knickpunkt) empfohlen, gefolgt von einem Abfall der Kurve auf -6dB bei 20kHz.
Für Anfänger klingt das vielleicht befremdlich, wir Audiophile wollen unsere Signale möglichst unbeeinflusst übertragen. Meine Empfehlung ist, das einfach mal auszuprobieren, also eine Target-Kurve zu wählen, die linear vom Bass bis zum Hochton verläuft. Das habe ich selbstverständlich auch gemacht. Nachdem ich ein paar Takte Musik mit den erzeugten Korrekturfiles gehört hatte, habe ich mich schnell wieder den empfohlenen Kurven zugewandt. Glaubt mir, so möchte niemand Musik hören.
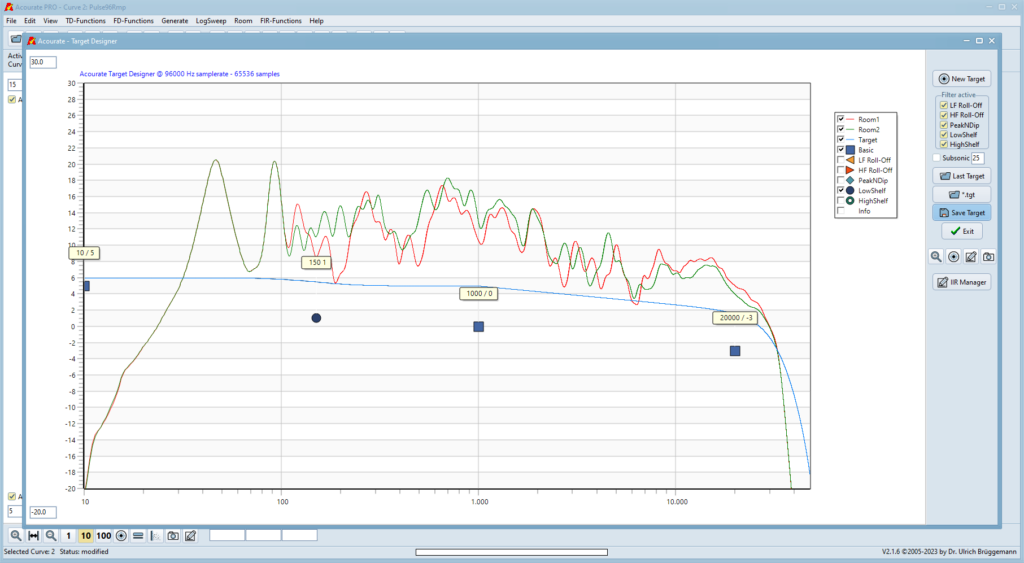
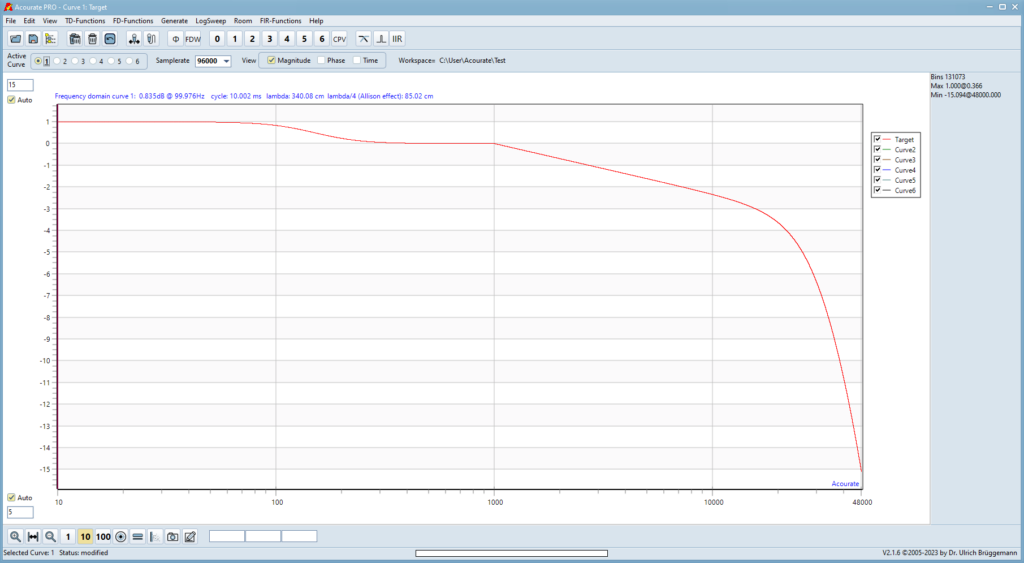
Meine Target-Kurve verläuft linear bis 1kHz und fällt dann auf -3dB bei 20kHz ab. Bei stark richtenden Lautsprechern ist es sinnvoll, den Hochton weniger stark abzusenken. Hinzu kommt eine Bass-Überhöhung (Low Shelf) von +1dB ab 150Hz abwärts. Zudem gibt es einen Tiefpassfilter bei 30kHz. Auf dem folgenden Screenshot ist der Verlauf meiner Kurve zu sehen. Ich höre nun schon seit mehr als einem Jahr unverändert damit.
Acourate: meine Target Kurve
Dr. Ulrich Brüggemann empfiehlt, an dieser Stelle keinen Subsonic-Filter zu erzeugen. Dies geschieht erst im Makro 4 (siehe unten).
Mit dem Aufruf von
Room -> Macro2
gelangt man in den Target Designer. Hier kann mithilfe der grafischen Marker die eigene Target-Kurve erzeugt werden. Eine Beschreibung der Funktionen und der Bedienung ist im Acourate-Wiki zu finden.
Ich selbst gehe den Weg über die Datei „Target.tgt”. Es handelt sich um eine Textdatei, die mit jedem normalen Editor bearbeitet werden kann. Wenn die Textdatei aus einer vorhergehenden Optimierung vorhanden ist, kann sie mit dem Button „*.tgt” geladen werden. Sie wird vom Target Designer erzeugt. Da meine Target-Kurve bereits definiert ist, muss ich nur noch den Grundpegel der Kurve in Bezug auf die aktuellen Messungen bestimmen.
Im nächsten Abschnitt zeige ich die relevanten Ausschnitte aus meiner Datei. Die oberen Werte bis zum „…“ beschreiben die empfohlene Startkurve (siehe oben), allerdings mit einer -3dB Absenkung bei 20kHz. Darunter sieht man den Tiefpassfilter und den Low Shelf. Ich passe aktuell nur noch den Wert für „0basicgain“ an.
Im Makro 2 gibt es zudem den Button „IIR-Manager”. In dem sich öffnenden Fenster können die im Absatz zuvor beschriebenen Einträge bequem vorgenommen werden. Ein Umweg über einen Texteditor ist damit eigentlich nicht nötig.
Acourate: Target Designer
Auf dem Bild oben erkennt man die Lage meiner Target Kurve (blau) in Bezug auf die geglätteten Messergebnisse. Die Kurve wird so hoch wie möglich geschoben, ohne dass dabei zu viele Messwerte unterhalb liegen. Korrigiert werden nur die Messwerte oberhalb der Target-Kurve. Eine geringfügige Unterschreitung an der einen oder anderen Stelle akzeptiere ich zugunsten des digitalen Headrooms.
Wenn man mit dem Ergebnis zufrieden ist, erzeugt man die für die Berechnungen benötigte „Target.dbl“ Datei, indem man auf den Button „Save Target” klickt.
Acourate: Target Kurve
Die Target Kurve wird nach der Berechnungen im Target Designer in Active Curve 3 dargestellt.
Room Macro 3 / Invertierung
13. Januar 2024
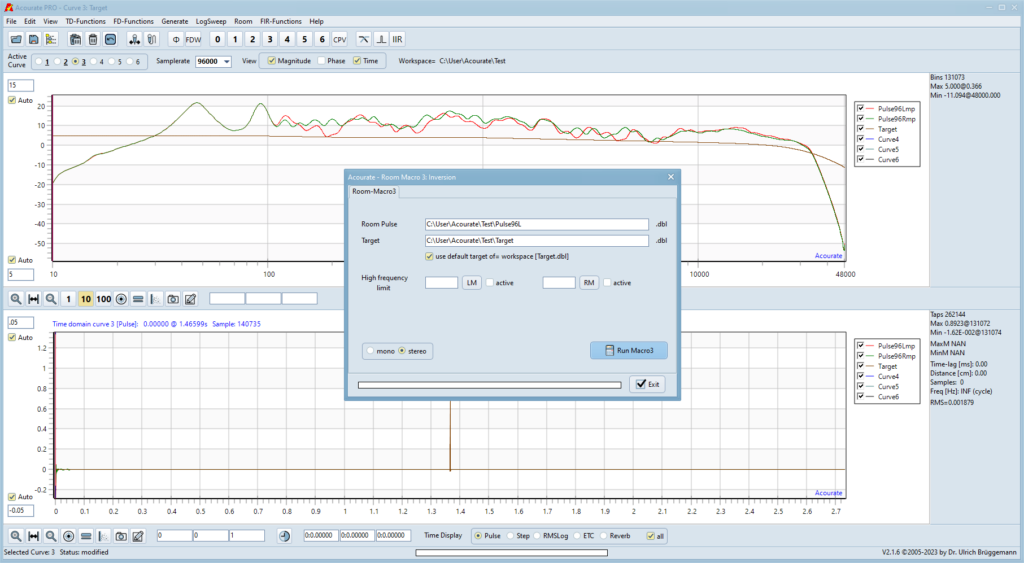
Bevor die eigentlichen Korrekturdateien berechnet werden, müssen die geglätteten Messwerte an der erzeugten Target-Kurve gespiegelt werden. Dies geschieht mit dem Aufruf von
Room -> Macro3
In dem sich öffnenden Fenster müssen in der Regel keine Angaben gemacht werden. Durch einen Klick auf den Button „Run Macro3” werden die inversen Kurven erzeugt. Anschließend wird das Fenster automatisch geschlossen.
Acourate: Inversion
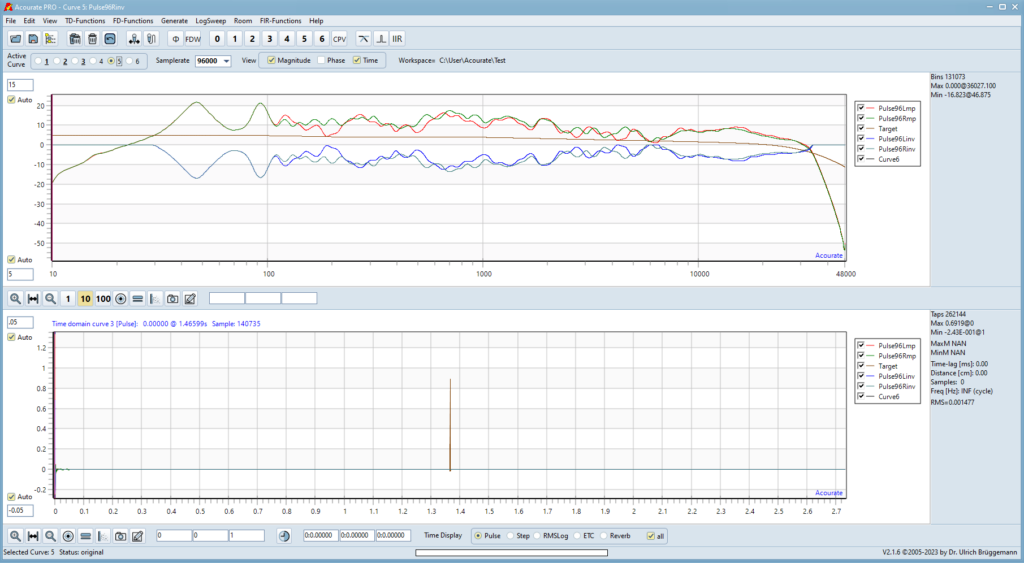
Die an der Target Kurve gespiegelten, geglätteten Messkurven werden in Active Curve 4 und 5 dargestellt.
Acourate: Invertierte geglättete Messkurven
Im Frequenzverlauf der Inversen sind jetzt auch die Auswirkungen des Parameters „High Frequency Treatment” aus dem Macro 1 sichtbar. Ab 33kHz werden die Original-Kurven nicht mehr an der Target-Kurve gespiegelt, sondern das Signal wird linear weitergeführt. Andernfalls würde es zu einem steilen Anstieg der Inversen im obersten Frequenzbereich kommen, da die Original-Kurven hier stark abfallen.
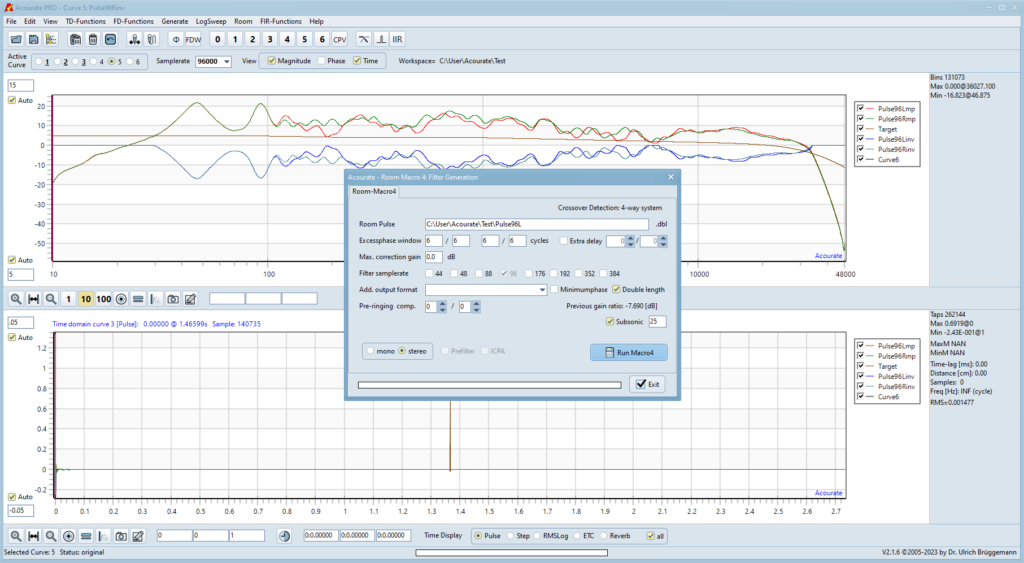
Room Macro 4 / Erzeugung der Korrekturfiles
02. Februar 2024
Bevor die Korrekturdateien berechnet werden, müssen die oben erzeugten Frequenzweichen-Dateien (XO*.dbl) im aktuellen Arbeitsverzeichnis liegen. Damit sind alle Vorbereitungen abgeschlossen. Mit
Room -> Macro4
öffnet sich das Fenster zur Erzeugung der Korrekturfiles.
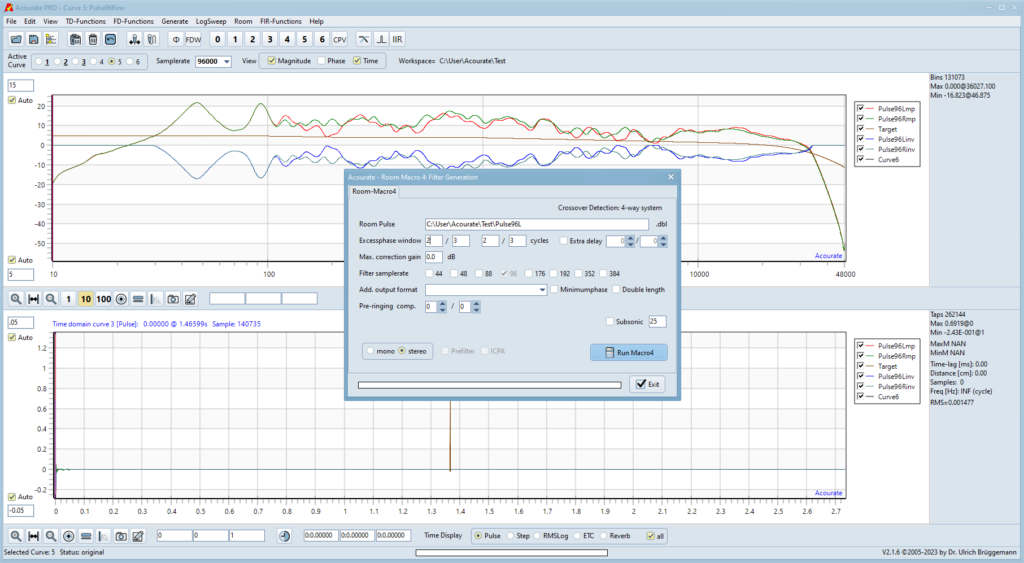
Acourate: Macro 4 / Filter Generation
Die Ausgabe „Crossover Detection: 4-way system” oben rechts im Fenster informiert darüber, dass die Frequenzweichen-Files erkannt wurden. Die Angabe bezieht sich selbstverständlich auf mein RQM-System.
Acourate: Macro 4 / Filter Generation
Bei der Eingabe für die „Excessphase Window“ sollte man das erste Mal ruhig mit den Default Werten anfangen. Ich verwende seit einiger Zeit die Werte 6/6/6/6. Mit diesen Parametern verhält es sich ähnlich wie bei Makro 1: An dieser Stelle gibt man jedoch die Werte für jeden Kanal einzeln ein. Die erste Zahl gilt wieder für die unterste und die zweite für die oberste gemessene Frequenz.
Zudem selektiere ich das „Subsonic“-Filter und gebe dort eine Grenzfrequenz von 25Hz an. Es handelt sich übrigens um ein NT-Filter 2. Ordnung. Die Korrekturdateien lasse ich mit „Double length” berechnen. Alle anderen Parameter belasse ich auf ihren Standardwerten.
Mit „Run Macro4” werden die Korrekturkurven berechnet und anschließend mit den Frequenzweichen-Files gefaltet. Nach der Berechnung befinden sich die folgenden Dateien im Arbeitsverzeichnis:
Cor1L96.dbl, Cor1R96.dbl – bis 125Hz / RiPol Subwoofer
Cor2L96.dbl, Cor2R96.dbl – von 125Hz bis 7,5kHz / obere Quads
Cor3L96.dbl, Cor3R96.dbl – von 125Hz bis 7,5kHz / untere Quads
Cor4L96.dbl, Cor4R96.dbl – ab 7,5kHz / Mundorfs
Wir haben nun die ersten Korrekturdateien für das Lautsprechersystem erzeugt und können diese nach der entsprechenden Umrechnung auf den AcourateConvolver übertragen. Allerdings sollte man sich das Ergebnis zunächst einmal anschauen.
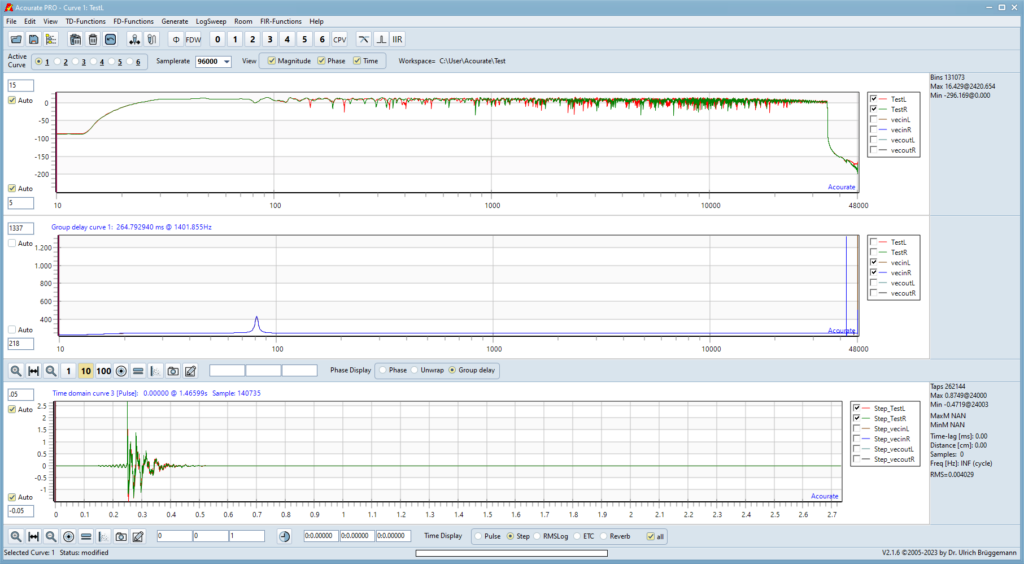
Room Macro 5 / Test Convolution
16. Juli 2026
Auf der Homepage von AudioVero findet man im Infocenter unter Anleitungen und Tutorials das Dokument:
Kompensation von Vorschwingern (Ergänzung)
Darin wird genau erklärt, was ich im Folgenden kurz beschreibe.
Durch den Aufruf von
Room -> Macro5
wird eine Testberechnung durchgeführt. Die gemessenen Signale werden mit den erstellten Korrekturfiltern verrechnet. So erhält man das Verhalten der Lautsprecher mit Korrektur, ohne das korrigierte System messen zu müssen. Überprüft man das System dann doch einmal aus reiner Neugier, wird man erstaunt sein, wie deckungsgleich beide Ergebnisse sind.
Acourate: Ergebnis der Berechnungen aus Macro 5
Im untersten Fenster (Time/Step) sind Vorschwinger vor den eigentlichen Sprungantworten erkennbar. Diese kann man mit kleineren Werten im „Excessphase Window“ (Macro 4) verringern oder sogar ganz beseitigen. Dies geht jedoch mit einer geringeren Phasenkorrektur einher. Trotzdem kann dies der richtige Ansatz für das eigene System sein.
Bei mir hingegen hat sich der Weg über die Kompensation der Vorschwinger als der richtige erwiesen.
Im mittleren Fenster (Phase / Group Delay) sind lediglich die beiden Eingangssignale „vecinL” und „vecinR” aktiviert. Bei ca. 80Hz kann man bei beiden Signalen einen Peak (Glockenkurve) erkennen. Die Anzahl der Peaks im rechten und linken Kanal wird abgezählt. Bei mir ist es jeweils einer. Der ganz große Peak am rechten Rand (> 30kHz) wird nicht berücksichtigt.
Mit diesem Ergebnis (1/1) geht es zurück ins Macro 4.
Wie ich oben bereits geschrieben habe, zeichnet sich ein Filter mit linearer Phase dadurch aus, dass er alle Frequenzen um exakt den gleichen Wert phasenverschiebt. Damit das funktioniert muss die Impulsantwort symmetrisch sein:
Der Hauptimpuls des Filters liegt in der Mitte, es existiert also bereits Energie davor. Das bedeutet, dass ein kurzer Impuls eine Antwort erzeugt, die bereits vor dem Impuls beginnt. Dieses Verhalten wird als Pre-Ringing bezeichnet. Dies hängt mit der Zeit-Frequenz-Dualität der Fouriertransformation zusammen und ist somit ein rein mathematisch erzeugter Effekt.
Pre-Ringing kann problematisch sein. Das menschliche Gehör nimmt Zeit asymmetrisch wahr, da es in der Natur keine Effekte gibt, die vor ihrer Ursache auftreten.
Ergänzung
Mitte Juli 2026 erhielt ich die Acourate Version 3.3.3 mit dem Hinweis, dass es das PRC in Macro 4 nicht mehr gibt. Auf meine Nachfrage, wie ich denn in Zukunft die Vorschwinger kompensieren sollte, kam die Antwort, ich solle es einfach mal versuchen. Gesagt, getan … Ich habe meine letzten Messungen genommen und die Optimierung von Macro 1 bis Macro 4 mit der neuen Version wie oben beschrieben durchgeführt. Bei der Überprüfung mit Macro 5 gab es keinerlei Vorschwinger mehr.
Ich bin begeistert!
Bei dieser Version erfolgt die Kompensation der Vorschwinger offensichtlich automatisch. Dies ist eine sehr gelungene und hilfreiche Erweiterung der Software!
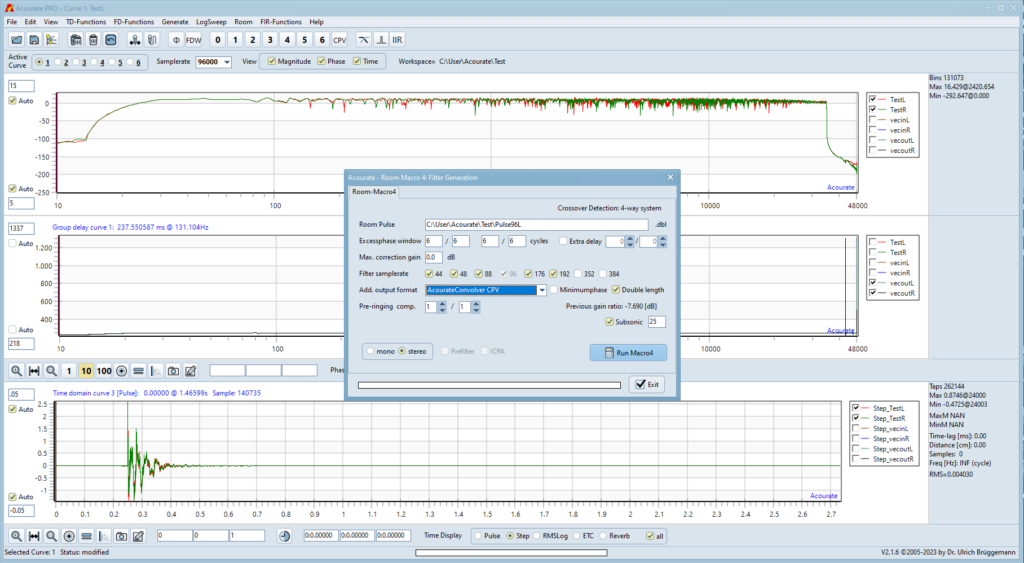
Room Macro 4 / Zweiter Aufruf
12. Juni 2024
Die eben ermittelten Werte für den linken und rechten Kanal werden im Fenster von Makro 4 bei „Pre-ringing comp.” eingetragen. An dieser Stelle ist es jeweils eine 1.
Acourate: Macro 4 / Filter Generation
Unter „Filter Samplerate” selektiere ich nun alle für meinen Wandler relevanten Frequenzen. Bei meinem Lynx Aurora(n) sind das 44…192 kHz. Zudem gebe ich unter „Add. Output Format” das gewünschte Format der Korrekturdateien an. Für die Verwendung mit dem AcourateConvolver sind das AcourateConvolver-cpv-Dateien. Danach können die Korrekturdateien mit „Run Macro4” erzeugt werden.
Das Ergebnis der Kompensation kann durch erneutes Aufrufen von Makro 5 eingesehen werden. Ich erspare mir an dieser Stelle die Darstellung des Ergebnisses. Ich kann jedoch berichten, dass die Vorschwinger bei meiner Konstellation verschwunden sind.
Die so generierten cpv-Dateien sollten nun auf den Convolver-PC übertragen werden. Ich rufe sie mit der Konfiguration 1 „Roon” auf. Die Dateien sind bei mir im Verzeichnis
c:\conf\1\1
abgelegt.
AcourateConvolver: Matrix mit den endgültigen Korrekturfiles
Oben ist die Matrix des AcourateConvolvers für mein RQM-System mit den entsprechenden Einträgen zu sehen.
Ist man bis hierher vorgedrungen, kann man sein Mehrwegesystem mit Raumkorrektur laufen lassen. An dieser Stelle sollte man auch erst einmal aufhören und mit dem Ergebnis einige Zeit leben.
Room Macro 6 / Inter Channel Phase Alignment
12. Juni 2024
Zur Beschreibung dieses Features von Acourate (ab Version 2.0.0) möchte ich einen kleinen Ausschnitt aus der Dokumentation heranziehen.
ICPA – Die Optimierung unsymmetrischer Stereo-Setups
Üblicherweise erfolgt bei der Raumkorrektur die Messung und die Amplituden- bzw. Phasenkorrektur jedes Stereokanals für sich allein. Es hat sich gezeigt, dass eine zusätzliche Verbesserung möglich ist wenn man im Anschluss beide Kanäle zusammen betrachtet und im Hinblick auf gegenseitige Wechselwirkungen optimiert. Dies gilt speziell für den Bereich der modalen Frequenzen bis 350Hz.
Die Ursache ist:
Unsymmetrie
Acourate V2 bietet nun eine zusätzliche Möglichkeit mit passenden Filtern das Hörergebnis zu verbessern. Diese Filter beeinflussen ausschließlich den Phasengang über das Frequenzband, nicht jedoch den Amplitudenfrequenzgang. Die Verstärker müssen also weder mehr, noch weniger leisten. Auch der indirekte Schallanteil bleibt unverändert.
Acourate Dokumentation
Diese Optimierung wird nach dem ersten Aufruf des Makros 4 durchgeführt.
Die Optimierung erfolgt durch den wechselseitigen Einsatz von Makro 4 und Makro 6: Zunächst wird Makro 4 ohne zusätzliche Frequenzberechnungen und *.cpv-Erzeugung durchgeführt (siehe Room Macro 4 / Erzeugung der Korrekturfiles). Auf dem Bild oben ist zu sehen, dass „ICPA“ beim ersten Aufruf ausgegraut ist. In Acourate liegen noch keine Berechnungen der Phasenkompensationsfilter vor.
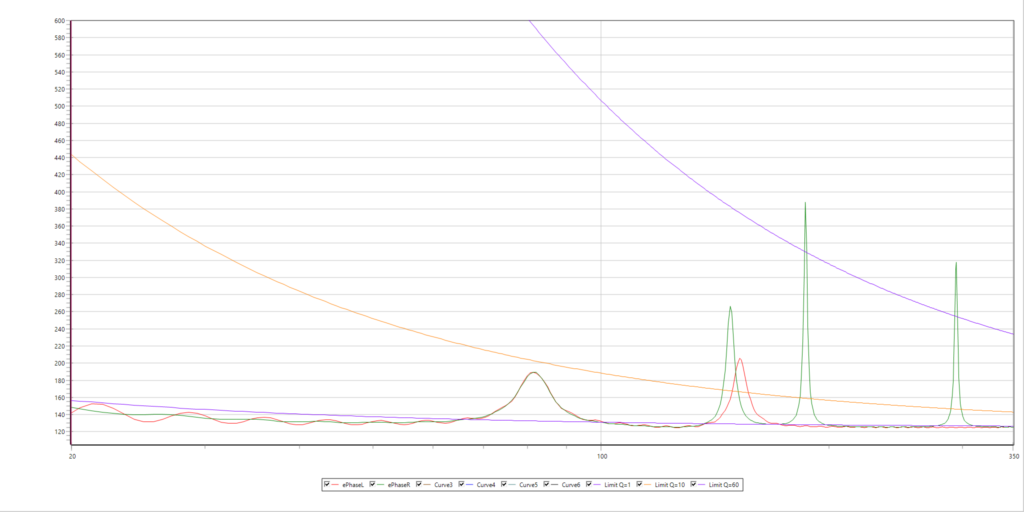
Nach der ersten Ausführung von Makro 4 lässt sich Makro 6 aufrufen. Für das RQM System erhält man
Acourate: Erster Aufruf von Makro 6 des RQM Systems
Die Peaks unter Q=10 (orangefarbene Linie) werden jeweils im eigenen Kanal kompensiert. Für das RQM-System sind dies die beiden Peaks bei ca. 81Hz. Alle Peaks oberhalb von Q=10, aber unterhalb von Q=60 (lila Linie), werden im jeweils anderen Kanal nachgebildet. Hier sind es die Peaks bei 148Hz und 152Hz. Alle Peaks mit einem Q-Wert größer als 60 bleiben unkorrigiert.
Ich habe mir angewöhnt, zunächst einen Peak zu kompensieren und anschließend Makro 4 erneut auszuführen. Nach erneutem Aufruf von Makro 6 sieht man direkt, wie gut der Peak kompensiert oder nachgebildet wurde. Danach bearbeite ich den nächsten Peak.
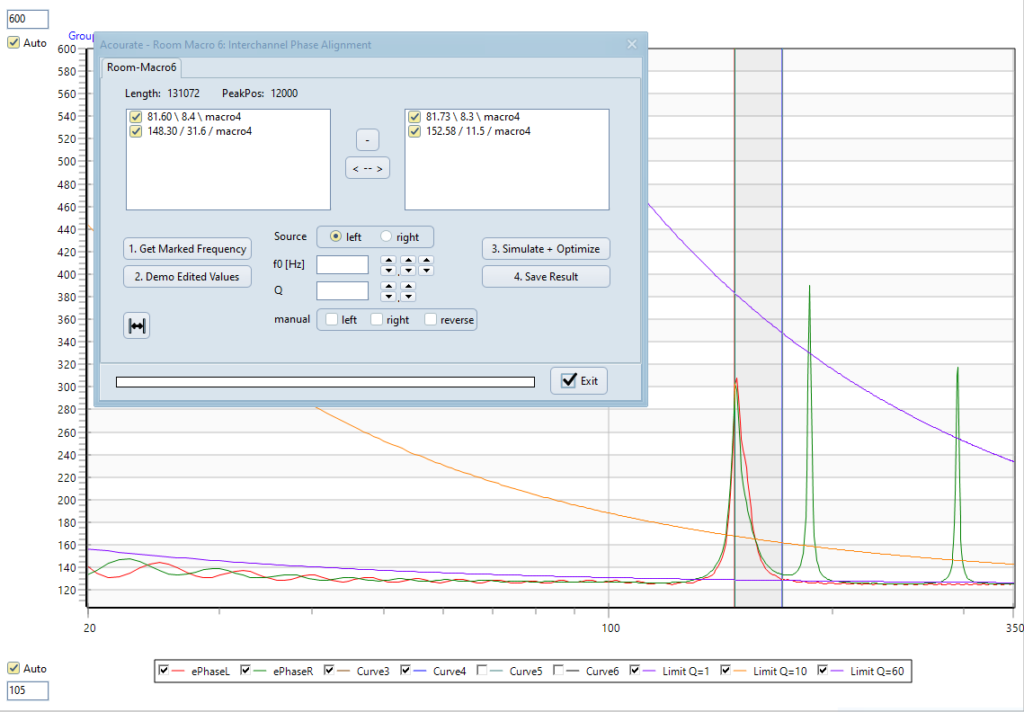
Für die Ermittlung zoomt man am besten erst einmal den zu bearbeitenden Peak heraus und setzt dann den Marker auf die Spitze. Dabei darf man nicht vergessen, den richtigen Kanal unter „Source“ auszuwählen. Mit „1. Get Marked Frequency“ werden die Werte in „f0 [Hz]“ und „Q“ übernommen. Anschließend können diese Werte mit den Pfeil-Buttons verändert werden. Mit „2. Demo Edited Values” wird die geänderte Kurve angezeigt. Wenn man mit dem Ergebnis zufrieden ist, klickt man auf „3. Simulate + Optimize“. Danach sieht man, wie sich die Einstellung auf die Phase auswirkt. Überzeugt einen die Korrektur, wird sie mit „4. Save Result“ gespeichert. Die Einstellung erscheint in einem der beiden oberen Fenster. Sind die Ergebnisse dort mit „/ macro4” gekennzeichnet, so wurden sie bereits mit diesem Makro verrechnet. Makro 6 wird mit einem Klick auf „Exit“ verlassen, ohne dass die bis dahin ermittelten Korrekturen verloren gehen.
Acourate: Makro 6 mit korrigierten Peaks
Das obige Bild entstand nach der Ermittlung aller vier für das RQM-System relevanten Peaks. Die Kompensation bei 81Hz gelingt perfekt, die Nachbildungen bei ca. 150Hz hingegen nur leidlich.
Zum Abschluss wird Makro 4 noch einmal aufgerufen. Dieses Mal erfolgt jedoch die Erzeugung der zusätzlichen Frequenzen und der *.cpv-Files (siehe: Room Macro 4 / Zweiter Aufruf).
Acourate setzt den Haken vor „ICPA“ selbst, wenn es entsprechende Ergebnisse im aktuellen Arbeitsverzeichnis findet. Damit werden die ICPA-Ergebnisse in die Korrekturfiles eingerechnet. Wenn das nicht gewünscht ist, kann der Haken vor „ICPA“ auch entfernt werden.
Nachhallzeit
19. Juni 2024
Als Nachhallzeit bezeichnet man das Zeitintervall, innerhalb dessen der Schalldruck in einem Raum bei plötzlichem Verstummen der Schallquelle auf einen festgelegten Bruchteil seines Anfangswerts abfällt (Nachhall). Meistens wird dabei ein Tausendstel als Bruchteil angesetzt, was einer Abnahme des Schalldruckpegels von 60dB entspricht. Die entsprechende Nachhallzeit wird dann mit T60 oder auch einfach T bezeichnet, im Englischen meist als reverberation time (RT). Sie ist eine der bekanntesten Kennzahlen der Raumakustik.
…
Der US-amerikanische Physiker Wallace Clement Sabine fand 1898 durch Experimente heraus, dass sich die Nachhallzeit proportional zum Volumen V eines Raumes und umgekehrt proportional zur äquivalenten Absorptionsfläche A der umschließenden Oberflächen verhält, d. h. je größer der Raum und je schallhärter (reflektierender) die Oberflächenmaterialien, desto länger die Nachhallzeit:
k ist eine Proportionalitätskonstante mit der Einheit s/m.
Wie in der Einleitung beschrieben, führte die erste Messung in meinem Raum zur Entwicklung des aktiven Absorbers. Dabei zeigte sich, dass mein Raum unterhalb von ca. 70Hz eine zu große Nachhallzeit hat. Ein Absorber entzieht dem Raum gezielt überschüssige Energie. Solche Probleme treten in einem häuslichen Hörraum normalerweise nur im Bassbereich unterhalb der Schröderfrequenz (ca. 300Hz) auf.
Raummode
Unterhalb der Schröderfrequenz können akustische Moden des Raums wahrnehmbare Klangverfärbungen bewirken. Da diese besonders die tiefen Töne betreffen, werden sie als Dröhnen, Booming oder Ein-Noten-Bass empfunden. Oberhalb dagegen verursachen sie in Wohnräumen keine hörbaren Verzerrungen der Wiedergabe, weil die Moden in Form von dichten Reflexionen und Nachhall ineinander übergehen.
Hat man eine LogSweep Messung vorliegen (siehe Messung der Lautsprecher im Raum), kann man daraus direkt die Nachhallzeit des Raumes bestimmen. Durch den Aufruf von
TD-Functions -> RT60: Reverberation Time
gelangt man in die Auswertung. Zunächst muss oben rechts die Norm angegeben werden, für die die Auswertung berechnet werden soll. Für eine Audio-Wiedergabe ist das „DIN 18041 Music”. Darunter gibt man die Größe des Raumes ein. Da mein Raum klassisch rechteckig ist, bereiten mir die Angaben keine Probleme. Letztendlich kommt es aber nur auf das Raumvolumen an (siehe Zitat oben) und man kann auch Werte eingeben, die nicht der Realität entsprechen, aber zum richtigen Volumen führen. Hierfür kann das Eingabefeld „+ correct” verwendet werden. Das habe ich schon bei verschiedenen Räumen mit Erfolg praktiziert, die nicht rechtwinklig waren.
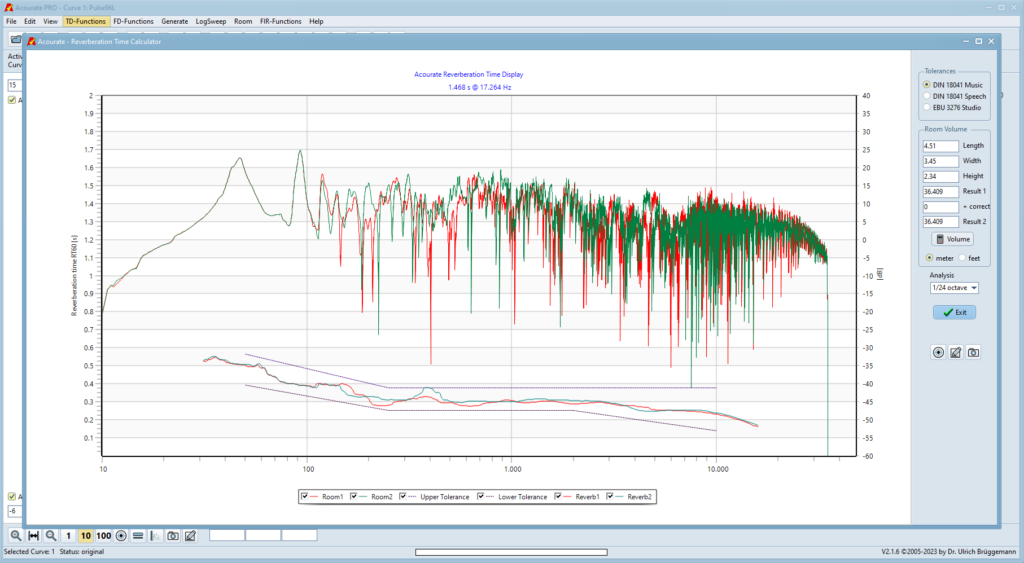
Acourate: Messung der Nachhallzeit
Die obige Messung zeigt die Nachhallzeit in meinem Hörraum mit abgeschaltetem Absorber. Die schraffierten Linien zeigen den Bereich, in dem sich die Nachhallzeit gemäß Norm und eingegebenem Volumen bewegen sollte. Abweichungen nach unten empfinde ich nicht als störend, da die Wiedergabe dadurch noch trockener wird. Abweichungen nach oben sind dagegen deutlich als Dröhnen wahrnehmbar.
Wie man erkennt, gibt es ein Problem unterhalb von ca. 70Hz. Es sieht vielleicht nicht besonders gravierend aus, aber das geschulte Ohr nimmt die verwaschene und unpräzise Basswiedergabe direkt wahr. Wenn man sich an eine korrekte Nachhallzeit gewöhnt hat, kann man mit diesem Ergebnis auf keinen Fall mehr leben!
Ich nutze diese Messung, um die Einstellungen des aktiven Absorbers für meinen Raum zu optimieren. Dabei hat sich für uns über die Jahre eine bestimmte Vorgehensweise herauskristallisiert. Beim Feintuning variiert man jedoch die Parameter und misst anschließend den Einfluss nach. Das ist zwar ein wenig aufwendig, aber das Ergebnis rechtfertigt die investierte Zeit.
Acourate: Messung der Nachhallzeit
Die Messung oben zeigt die Situation mit aktivem Absorber und optimierten Parametern.
So sollte es sein!
Leider kann ich nicht in Worte fassen, was die obige Kurve wirklich bedeutet. Man muss es hören und dann auch begreifen, was man da hört.
Um es an dieser Stelle noch einmal ganz deutlich zu schreiben: Die Nachhallzeit ist eine reine Funktion des Raumes. Um eine zu hohe Nachhallzeit zu verringern, ist ein Absorber das probateste Mittel. Dabei muss es sich nicht um eine aktive (elektronische) Lösung handeln. Wer gerne mit Holz arbeitet und sich diesem Thema widmen möchte, sollte sich unter dem Stichwort „Helmholtz-Resonator” im Internet umschauen.
Die folgenden Textpassagen habe ich mir der Einfachheit halber dem Acourate-Wiki entliehen.
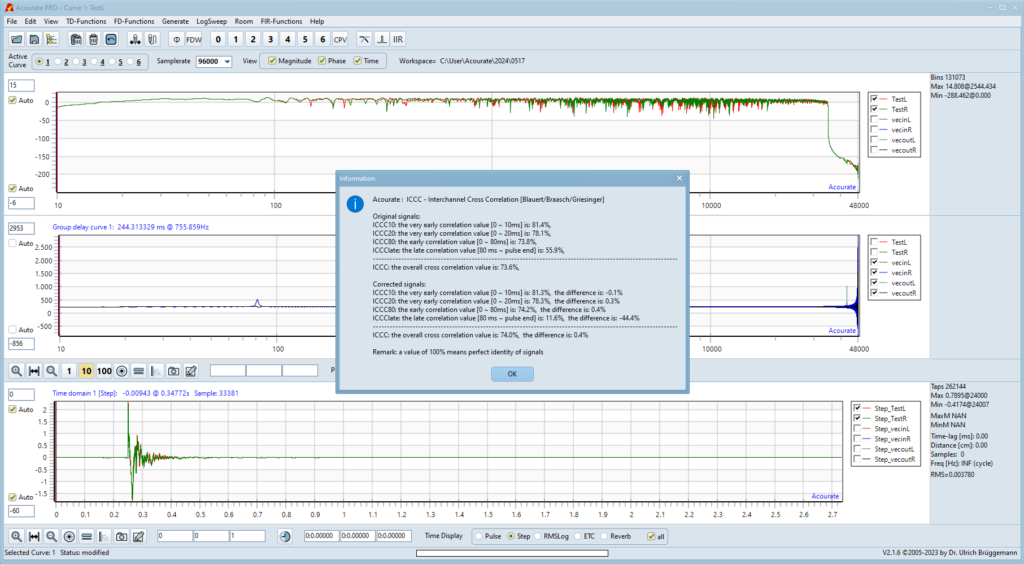
IACC Interaural Coherence Coefficient
Bei dieser Bewertung werden die Signale des linken und rechten Kanals innerhalb verschiedener Zeitfenster miteinander verglichen. Sie lassen Rückschlüsse auf die Qualität der Stereo-Abbildung zu. Diese werden durch die Lautsprecher selbst (Paargleichheit) wie auch durch die Akustik des Raumes beeinflusst. Sowohl die Aufstellung der Lautsprecher als auch akustische Maßnahmen lassen sich mit Vergleichen des ICCC optimieren.
IACC10: Der eintreffende Schall in den ersten 10ms sollte für eine gute Stereoabbildung möglichst einen Wert über 80% erreichen. Lautsprecher mit einem hohen Bündelungsgrad erreichen hier bauartbedingt hohe Werte.
IACC20: Der eintreffende Schall der ersten 20ms besteht aus Direkt- und dem ersten eintreffenden Diffusschall. Für die Stereo-Abbildung sollten frühe Reflexionen in den ersten 20ms vermieden werden. Treffen diese aus dem linken und rechten Kanal unterschiedlich ein, verringert sich der ICCC-Wert. Werden diese erkannt und durch geeignete akustische Maßnahmen ausgeschaltet, erhöhen sich die ICCC-Werte.
IACC80: Der Schall in den ersten 80ms enthält sehr viel mehr Rauminformation als die vorhergehenden beiden Werte.
IACClate: Vergleicht den erzeugten Nachhall der beiden Kanäle.
Bemerkung: In der Zwischenzeit ist die Funktion in ICCC – Interchannel Cross Correlation – umbenannt worden.
Zu bemerken bleibt noch, dass die Kanäle für ICCClate nicht korreliert sein sollten, sodass der Wert möglichst klein ausfällt. Der ICCC-Mittelwert (Overall Cross Correlation) liegt bei den meisten guten Audio-Anlagen im Bereich von 65–75%.
Zurzeit habe ich im Raum neben dem aktiven Absorber nur zwei raumakustische Maßnahmen installiert. Vor dem Fenster hängt ein Vorhang aus Bühnenmolton, und die Tür ist mit Schwerfolie beklebt (siehe Nachhallzeit). Ein Umstellen der Möbel oder der Lautsprecher ist in dem Raum praktisch nicht möglich. Ich muss also mit den Gegebenheiten leben. Allerdings plane ich schon seit Langem den Einsatz von Diffusoren an der Wand hinter den Lautsprechern.
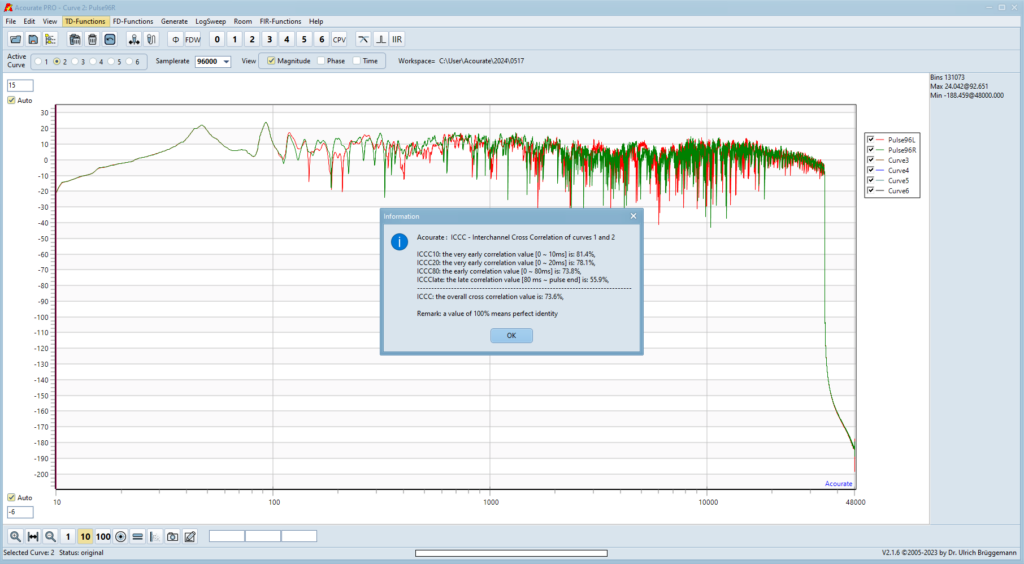
Acourate: ICCC nach der Optimierung
Oben ist mein Ergebnis nach der Optimierung durch Acourate zu sehen. ICCC10 hat sich geringfügig verschlechtert. ICCC20 und ICCC80 sind hingegen etwas besser geworden. Eine drastische Verbesserung gab es bei ICCClate. Der ICCC-Mittelwert verbesserte sich von 73,6% auf 74,0%. Grundsätzlich kann ich mit dem Ergebnis zufrieden sein. Es gibt allerdings noch einiges zu tun (siehe ETC)!
Man sollte sich nicht allzu sehr von den Zahlen beeinflussen lassen. Sie zeigen, ob es Verbesserungspotenzial am Aufbau des eigenen Systems gibt (Stichworte: Kanalgleichheit, erste Reflexionen). Letztendlich entscheidet jedoch jeder für sich selbst, ob er mit der erreichten Wiedergabequalität zufrieden ist.
Energy Time Curve
10. August 2024
Mithilfe der Energy Time Curve (ETC) kann das Abklingen eines Impulses im Raum über der Zeit gemessen werden. Unsere Ortswahrnehmung basiert auf dem Direktschall und den ersten 20ms, nachdem dieser unsere Ohren erreicht hat. Dabei sollte die erste Wellenfront zeitlich kohärent eintreffen (Stichwort: Time Alignment). Um keine falschen räumlichen Informationen zu erhalten, müssen die frühen Reflexionen unterdrückt oder umgelenkt werden.
Befindet sich ein Lautsprecher in der Nähe einer schallharten Seitenwand, kann der reflektierte Schall annähernd den gleichen Pegel wie der direkte Schall erreichen. Dies könnte nicht nur den Frequenzgang, sondern auch die Wahrnehmung der räumlichen Informationen der Aufnahme beeinflussen.
Die folgenden Angaben entnahm ich dem Buch von Mitch Barnett: Die Energy Time Curve stellt die Reflexionsschwelle in dB relativ zum Direktschall als Funktion der relativen Verzögerung in Millisekunden dar. Laut Toole (1990, Loudspeakers and Rooms for Stereophonic Sound Reproduction) sollte der Pegel der Reflexionen innerhalb der ersten 20ms um 15dB unter dem des Direktschalls liegen. In der Technischen Mitteilung EBU-Tech 3276 (Listening conditions for the assessment of sound programme material: monophonic and two-channel stereophonic) wird jedoch nur ein Wert von -10dB gefordert. Und schließlich gibt es noch die LEDE-Spezifikation, die sogar eine Verringerung um 20dB vorschreibt.
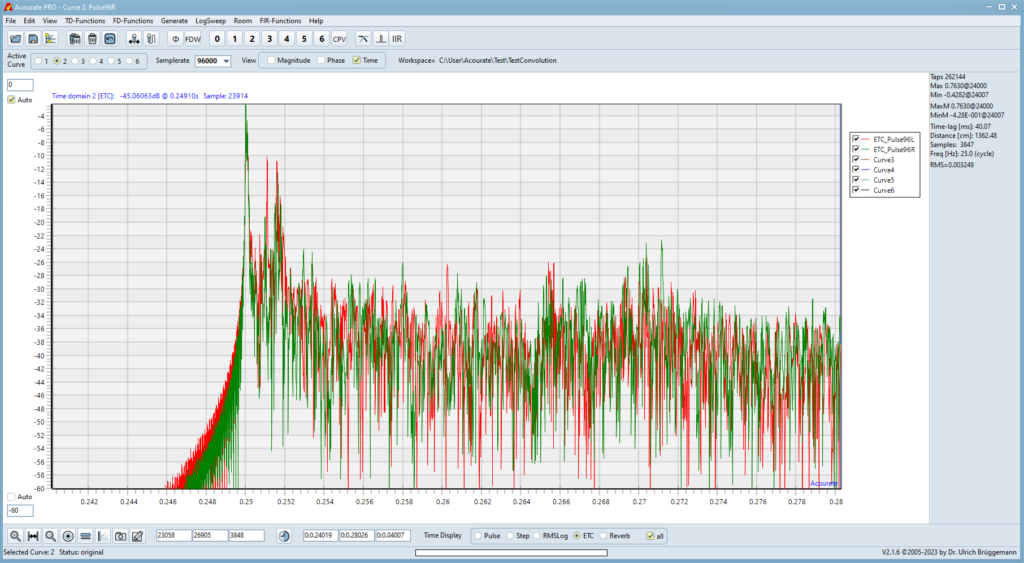
Die ETC-Kurve wird aus einer LogSweep-Messung ermittelt (siehe Messung der Lautsprecher im Raum). Dazu selektiert man das Zeitfenster (Time) am oberen Bildschirmrand und wählt unterhalb der grafischen Darstellung die Option „ETC” aus. Im unteren Bild ist das Ergebnis für eine Test-Convolution nach einer Optimierung für meinen Raum dargestellt.
Acourate: Energy Time Curve
Um die Beurteilung zu erleichtern, habe ich die y-Achse nach unten hin auf -60dB beschränkt. Zudem sind die Signale zeitlich so gezoomt, dass nach dem Hauptimpuls (0,25s / 24.000 Samples) nur noch etwas mehr als 20ms dargestellt werden.
Man kann erkennen, dass ich gerade eben die EBU-Tech 3276 mit -10dB erfülle.
Mein Ziel ist es, mindestens den Mittelwert der drei Anforderungen, d. h. eine Dämpfung von -15dB in beiden Kanälen, zu erreichen. Zunächst muss ich jedoch herausfinden, woher die frühen Reflexionen kommen.
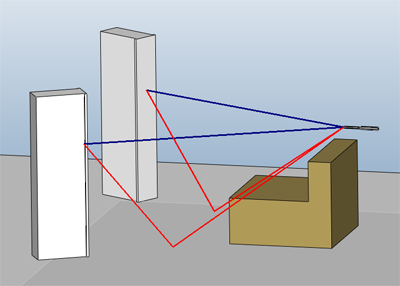
Ein Hinweis darauf gibt der zeitliche Abstand der Reflexionen zum Hauptimpuls bei 0,25s (tP0). Im linken Kanal gibt es 3 Peaks oberhalb von -15dB. Im rechten ist es nur einer.
Bei einer Schallgeschwindigkeit von cS = 343m/s errechnen sich die zusätzlichen Wege l der Reflexionen aus
Gemessen habe ich die folgenden Zeiten der Reflexionen im linken Kanal
und im rechten Kanal
Mithilfe dieser Angaben können die zusätzlichen Weglängen berechnet werden, die die Reflexionen zurücklegen müssen.
Erkennen von störenden Raumreflexionen in der Pulsantwort
Hat man die Strecke ausgemessen, welche der Schall zusätzlich benötigt, kann der Verursacher folgendermaßen ermittelt werden: Man spannt eine Schnur vom Hochtöner des Lautsprechers zum Hörplatz, verlängert die Schnur um die angegebene Strecke und ermittelt, welche Flächen sich mit der Schnur berühren lassen: Die Blaue Linie ist der Weg des Direktschalls vom Lautsprecher zum Messmikrofon. Die rote Linie ist der längere Weg des Diffusschalls. Statt einer Schnur ist die Verwendung eines Laser-Entfernungsmessers hilfreich. So können auch leichter Reflexionspunkte von der Decke des Hörraums ausgemessen werden.
Wie im obigen Zitat zu lesen ist, werden die Reflexionspunkte vom Hochtöner aus ermittelt. Allerdings gibt es bei meinen Mundorfs in der ermittelten Entfernung keine solchen Reflexionspunkte. Das führt direkt zur Frage, wo der Ansatzpunkt für eine solche Ermittlung bei einem Flächenstrahler liegt. Die beiden oberen Quads scheiden schon einmal aus. Es gibt bei ihnen auch keine geeigneten Reflexionspunkte, egal von welchem Punkt auf der Mittelhochtonfolie ich starte. Es bleiben also nur die beiden unteren Quads. Bei ihnen gibt es den Fußboden, der zu den Berechnungen passen würde. Zumindest, wenn man vom unteren Bereich der Folie ausgeht.